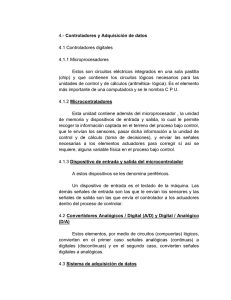
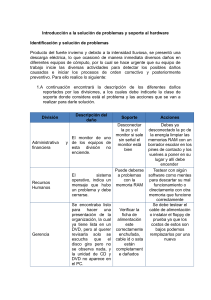
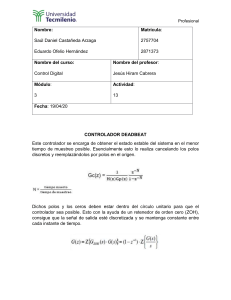
Escuela Superior Politécnica del Litoral Laboratorio de Control Avanzado II PAO 2023 Práctica # 8: Diseño de controladores discretos usando lugar geométrico de las raícesSimulación Nombre: Paralelo: Wilson Andre Ochoa Mendoza 102 Objetivos Objetivo General Diseñar controladores discretos usando técnicas del lugar geométrico de las raíces en sisotool de MATLAB ® para la evaluación del desempeño de estos en plantas didácticas. Objetivos Específicos Diseñar dos controladores en base a los requerimientos planteados en cada caso usando sisotool. Probar cada uno de los controladores diseñados con el respectivo sistema en estudio. Verificar el cumplimiento de los requerimientos de diseño a partir de las gráficas obtenidas. Procedimiento Función de transferencia discreta: Respuesta escalón inicial mostrando características Lugar geométrico de las raíces inicial Controlador 1 LGR con requerimientos de diseño marcados Función de transferencia del controlador obtenido Parámetros del controlador 𝐾𝑝 = 0.06367 𝐾𝑖 =0.001387 𝐾𝑑 =0 Respuesta escalón final mostrando cumplimiento de índices de desempeño solicitados Controlador 2 LGR con requerimientos de diseño marcados Función de transferencia del controlador obtenido Parámetros del controlador 𝐾𝑝 = 0.2981 𝐾𝑖 =-0.1978 𝐾𝑑 =0.1997 Respuesta escalón final mostrando cumplimiento de índices de desempeño solicitados Simulación Diagrama de bloques a utilizar Entrada y salida del sistema superpuestas vs tiempo (Controlador 1). Recuerde incluir marquillas, título y cuadrícula. Podemos ver en el recuadro señalado que el tiempo de estabilización es 121 , el que se deseaba era 120 podemos ver que se alcanzo dicho valor . Entrada y salida del sistema superpuestas vs tiempo (Controlador 2). Recuerde incluir marquillas, título y cuadrícula. Señales de control en subfigura Tabla comparativa Controlador 1 Índices de desempeño deseados 1. SP=15% 2. Tp 3. Tss=120 s 4. Ess=0% Índices de desempeño obtenidos 14.5% 1.14 2121-2000=121 =0% % de error 3% 5.7% =0% Controlador 2 Índices de desempeño deseados 1. SP=0 2. Tp 3. Tss=60s 4. Ess=0 Índices de desempeño obtenidos % de error 0 0 60 0 0 0 Conclusiones y Recomendaciones CONCLUSIONES Se diseño controladores discretos usando técnicas con ayuda de sisotool y lugares geométricos de las raíces Se pudo crear controladores a partir de requerimientos dados y utilizando conceptos de diseño de control Se realizo el diseño de 2 controladores y se exporto a Matlab para poder corroborar que cumplan de manera eficiente o cercana a los valores dados de diseño RECOMENDACIONES Se debe generar de manera correcta el movimiento d ellos polos al momento de crear el controlador y colocar el scope en Array. Es recomendable generar un integrador y/o para poder cumplir con los requerimientos dado Se debe utilizar cursores o puntos y marcas para ver los tiempos de estabilización de manera optima. Sección Procedimiento Puntaje /70 puntos Conclusiones y Recomendaciones /30 puntos Observación Debe incluir todas las respuestas y capturas de pantalla solicitadas. Debe incluir al menos 3 conclusiones y 2 recomendaciones. Faltas ortográficas serán penalizadas.