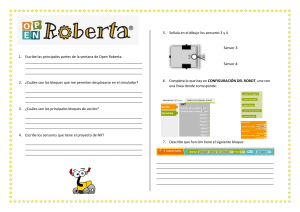
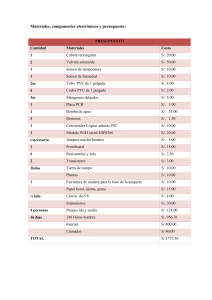
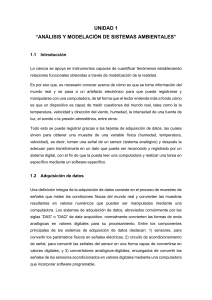
Proyecto 1: Diseño “POV Globe” Figueroa Arce Michael David Gomez Arce Brayan Andres García Vega Nicolas Karan Castilla Mateo Felipe Propuesta: El primer avance del Proyecto 1 corresponde a las especificaciones de diseño y presupuesto del sistema "Persistence of Vision (POV) Globe" a implementar. Para ello, cada equipo de trabajo realizará una investigación sobre los diferentes mecanismos usados en este tipo de sistemas, los motores y los sensores para el movimiento y la sincronización de la imagen, los diseños en 3D que puedan ser replicados, proveedores de los componentes a usar y demás elementos que permitan tener una idea completa de las características que tendrá el sistema a implementar. Para el diseño del POV Globe se realizó la investigación de proyectos realizados por la comunidad, para de esta forma elegir la ruta a seguir en la construcción del proyecto. Para esto se divide el documento de la siguiente forma: 1. 2. 3. 4. 5. 6. Mecanismos……………………………………………………………………………2 Motores………………………………………………………………………………...3 Sensores………………………………………………………………………………..4 Sincronización de la imagen…………………………………………………………...5 Imagenes 3D……………………………………………………………………………6 Presupuesto……………………………………………………………………………..7 1. Mecanismos: Para este apartado se decidió diseñar el bosquejo del proyecto en el software FreeCAD, este se puede observar en la imagen 1. Figura 1. Bosquejo en 3D. Como se observa en la figura 1 contamos con dos partes principales, la base que es la encargada de sostener el aro de giro, en esta parte se está considerando el uso de madera o de metal. Se cuenta con el aro de giro que es el lugar donde estará ubicada la tira LED, esta pieza será impresa en una máquina de impresión 3D que demora unas 3 horas en entregarnos la pieza. Para el eje de rotación se plantea implementar una varilla que atraviese el aro central de un lado a otro, de esta manera será conectada al motor por medio de una polea. Finalmente para fijar el aro al soporte principal se utilizarán dos balineras que nos permitirá mantener un giro constante. Cabe destacar que la tira LED tiene 3 conexiones cableadas, para evitar que estas se enrollen se propone ubicar el arduino en el centro del aro, este estará fijo a la varilla y de esta forma se planea evitar el inconveniente descrito anteriormente. Para la alimentación del arduino se utilizará una batería recargable tipo lipo. Se recalca que este diseño está abierto a cambios dependiendo de problemas que puedan surgir a lo largo de su construcción. 2. Motores: Para el proyecto se propone la utilización de un motor Dc que es el encargado de transmitir el giro hacía la varilla, este se puede observar en la figura 2. Figura 2. Motor DC. Como se observa en la figura 2 contamos con un motor Dc que cuando es alimentado a 6v nos genera aproximadamente 4500 rpm, esta parte es de vital importancia ya que cada 900 rpm se obtienen 30 imágenes por segundo, así que si contamos con 4500 rpm obtendremos 150 imágenes por segundo lo que nos permitirá obtener buena calidad de imagen. 3. Sensores: El sensor que se busca para el proyecto globo pov es un sensor el cual debe ser un sensor de efecto hall, se utilizará para la parte del funcionamiento donde estará encargada de la revisión de las vueltas, en este caso se por economía y funcionamiento se tienen las siguientes dos opciones: Opción 1: Figura 3. Primera opción sensor. Opción 2: Figura 4. Primera opción sensor. Estos sensores se han elegido como opciones inspirado en el proyecto de Instructables circuits, la cual se encuenta en este link https://www.instructables.com/Make-Your-Own-POV-LED-Globe 4. Sincronización de la imagen: En este espacio se basa en cómo el sketch trata la imagen que se quiere proyectar para la cual se debe calcular los pixeles segun la resolucion que depende del hardware y una vez hecho esto el sketch debe calcular el tiempo del mensaje serial dependiendo de los los pixeles y el tiempo que el dispositivo se demora en dar una vuelta, este proceso se puede reflejar en el siguiente diagrama de flujo: Figura 5. Diagrama de Flujo.. 5. Imagenes 3D: En el proceso de búsqueda se encontraron 2 métodos para la ilustración de las imágenes, por un lado un sistema en el microcontrolador con un lector de tarjeta SD el cual incluía imágenes en formato .bmp y con ayuda de un código en Arduino se realiza el contraste de cada color RGB que se verá reflejado en los LEDs, pero se decidió en base en que la mayoría de los proyectos investigados hicieron las imágenes ilustradas en los LEDs por medio de matrices en el código de Arduino, realizando un mapa por filas y celdas donde se especificaba qué LEDs se encienden (con un 1) y cuáles se apagaban (con un 0), en la figura 6 se presenta diferentes métodos para representar los diferentes arreglos, todo dependiendo de la cantidad de LEDs se definirán la cantidad de filas y columnas del sistema. Figura 6. Arreglo de matrices de LEDs encendidos y apagados. 6.Presupuesto: Componentes Valor Motor Dc $28.000 Sensor $15.000 Aro $ Varilla $5.000 Polea $ Base principal $20.000 Batería lipo $29.000 Balineras $5.000 Tira LED $42.000 TOTAL $102.000 El presupuesto está abierto a cambios dado que se manejaron precios aproximados.