0503_ Din\341mica de Rotaci\363n.doc
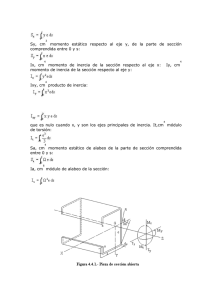
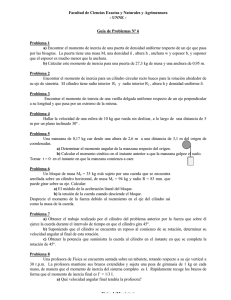
Anuncio

1 2 Física General I Paralelos 05 y 22. Profesor RodrigoVergara R Física General I Paralelos 05 y 22. Profesor RodrigoVergara R 0503) Dinámica de Rotación N 1 2 K = ∑ mn ( Rnω ) 2 n =1 A) Inercia Rotacional Los factores ½ y ω son iguales para todos los sumandos, así que pueden sacarse fuera de la suma: En las rotaciones, tal como en las traslaciones, existe una inercia y un principio que la rige. El principio de inercia para rotación dice que “todo cuerpo en reposo permanecerá en reposo, y todo cuerpo en movimiento rotatorio seguirá con ese movimiento, salvo que sobre él actúen torques exteriores que le obliguen a modificar esos estados”. Así, todo cuerpo en rotación constante tiende a mantener constante su vector velocidad angular. K= Podemos escribir la energía cinética del objeto rígido como: K= Figura 1) Persona tratando de girar una En la figura 1 apreciamos a una persona tratando rueda de mover el eje de una rueda. Debido a la inercia rotacional, si la rueda gira con velocidad angular nula, cuesta mover su eje, mientras que si la velocidad angular es nula, resulta fácil cambiar la dirección del eje. Momento de Inercia Cuando un objeto rígido como el de la figura 2 gira con una velocidad angular ω, existe una energía cinética asociada a su rotación. El cuerpo puede ser descompuesto en un gran número N de pequeñas partículas, cada una de masa mn con rapidez tangencial vn, y una distancia Rn del centro de rotación. Cada partícula tiene asociada una energía cinética: 1 K n = m nv n2 2 1 2 N 2 ω ∑ mn ( Rn ) 2 n =1 Figura 2) Cuerpo rígido girando La energía cinética K de todo el objeto rígido es la suma de las energías cinéticas de las N partículas que la componen. Así: N N 1 K = ∑ K n = ∑ mnv n2 n =1 n =1 2 Las diversas partículas poseen diferentes velocidades tangenciales, pero como el objeto es rígido, todas las partículas tienen el mismo módulo de velocidad angular ω. Usando la relación v n = Rnω , podemos escribir la energía cinética del objeto rígido como: 1 N 1 ∑ mnRn2 ω 2 = 2 Iω 2 2 n =1 Donde I es el momento de inercia (o inercia rotacional) del objeto, definido como: N I = ∑ mn Rn2 n =1 El momento de inercia se mide en [kg·m2] (MKS) y es una cantidad física escalar. Como se desprende de la definición, depende de: • Las masas de las partículas del objeto rígido. • La distancia entre las partículas y el eje de giro En general, un mismo cuerpo tiene diferentes momentos de inercia dependiendo del eje de giro. En un objeto o sistema de masas, mientras más lejos estén las masas de un sistema del centro de giro, mayor es el momento de inercia y más cuesta hacerlo girar. Así, los sistemas mostrados en la figura 3, en los cuales la masa está cerca del eje de giro, tienen baja inercia rotacional, por lo que son fáciles de girar. Por el contrario, los sistemas de la figura 4 tienen mayor concentración de masa lejos del eje de giro, por lo que su momento de inercia es mayor y son por tanto más difíciles de hacer girar Figura 3) Sistemas con masas cercanas al eje de giro La idea de momento de inercia permite explicar la razón de ciertos fenómenos de la vida cotidiana: Figura 4) Sistemas con masas cercanas al • En la figura 5a se aprecian dos péndulos, eje de giro uno corto y otro largo. Como el péndulo corto tiene menor inercia rotacional que el péndulo largo, resulta más fácil hacerlo oscilar, lo que es coherente con el hecho de que su frecuencia de oscilación es mayor. 3 4 • • • • Física General I Paralelos 05 y 22. Profesor RodrigoVergara R Sosteniendo una vara larga, el equilibrista de la cuerda floja de la figura 5b aumenta su inercia rotacional. Así, se hace más difícil que vuelque producto de un eventual desequilibrio, disponiendo de tiempo suficiente para reajustar su centro de masa mientras avanza. Dadas distribuciones de masa semejantes, las patas cortas tienen menor inercia rotacional que las patas largas. Así, los animales de patas cortas Figura 5) Momento de inercia y la vida cotidiana. (a) pueden correr más rápido que péndulo; (b) equilibrista; (c) animales de patas largas y los de patas largas, como la cortas. (d) persona corriendo; (e) cilindros cayendo en un jirafa de la figura 5c. plano inclinado. Observando la figura 5d, podemos entender porqué doblamos las piernas al correr. Al hacerlo, reducimos su inercia rotacional, con lo que se hace más fácil hacerlas girar. En el caso de los cilindros de igual masa cayendo en un plano inclinado mostrados en la figura 5e, el cilindro sólido (masa repartida en todo el cilindro) tiene menor inercia rotacional Figura 6) Ejes de giro del cuerpo humano que el cilindro hueco (que tiene toda la masa concentrada lejos del eje de giro del cilindro): Luego, el cilindro sólido rodará más aprisa, y llegará antes al punto más bajo del plano inclinado. El cuerpo humano puede girar libremente y en forma estable alrededor de los tres ejes principales de rotación mutuamente perpendiculares, que se muestran en la figura 6. Estos son: longitudinal, medio y transversal. La inercia rotacional más pequeña es respecto al eje longitudinal (eje vertical que va de la cabeza a los pies) pues la mayor parte de la masa se concentra alrededor de este eje. Por ello, resulta más fácil rotar alrededor del eje longitudinal que de los otros dos. Física General I Paralelos 05 y 22. Profesor RodrigoVergara R Momento de Inercia de diferentes cuerpos. Figura Descripción Péndulo Simple Valor del Momento de Inercia Aro girando en torno a su eje normal I = mr 2 Aro girando en torno a un diámetro 1 I = mr 2 2 2 I = mr 2 3 I = mr 2 Aro girando en torno a una línea tangente Cilindro anular (anillo), con respecto al eje del cilindro 1 I = m ( R12 + R22 ) 2 Cilindro sólido, con respecto al eje del cilindro 1 I = mR 2 2 Cilindro de largo L alrededor de un diámetro central Barra delgada girando en torno a su Centro de Masa I= mR 2 mL2 + 4 12 I= 1 m2 12 Barra delgada girando en torno de uno de sus extremos 1 I = m 2 3 Esfera rellena girando en torno a cualquiera de sus diámetros 2 I = mR 2 5 Esfera hueca (cascarón esférico) girando en torno a cualquiera de sus diámetros 2 I = mR 2 3 5 6 Física General I Paralelos 05 y 22. Profesor RodrigoVergara R Placa rectangular girando en 1 torno a su Centro de Masa I= m 12 Placa rectangular girando en torno a uno de sus bordes. (a 2 + b2 ) 1 I = ma 2 3 Física General I Paralelos 05 y 22. Profesor RodrigoVergara R Sumando N partículas que conforman el cuerpo rígido completo, se puede calcular que el momento total de inercia Icm en torno al centro de masa es: N N n =1 n =1 Icm = ∑ Icmn = ∑ mn ( x n2 + y n2 ) Por otra parte, el momento de inercia IP en torno a P es: N N 2 2 IP = ∑ IPn = ∑ mn ( xn − a ) + ( y n − b ) n =1 n =1 Teorema de los Ejes Paralelos Un cuerpo tiene infinitos momentos de inercia, pues en número de ejes de giro que podría tener es infinito. Existe una relación simple entre el momento de inercia Icm de un cuerpo de masa M alrededor de un eje que pasa por el centro de masa y el momento IP alrededor de cualquier otro eje paralelo al original pero desplazado una distancia d. Esta relación es el teorema de los ejes paralelos, y dice que: Expandiendo los cuadrados y reagrupando: N IP = ∑ mn x n2 − 2ax n + a 2 + y n2 − 2by n + b 2 n =1 N N N n =1 n =1 = ∑ mn ( xn2 + y n2 ) − 2a ∑ mn x n − 2b ∑ mn y n n =1 N + ∑ mn ( a + b 2 IP = I cm +Md 2 2 ) n =1 A continuación, se demostrará este teorema Figura 7) Cuerpo rígido (demostración del teorema de los ejes paralelos) Analizando los términos: N Tomando como referencia el cuerpo rígido de la figura 11, considere dos ejes paralelos al eje z, uno que pasa por el centro de masa y otro que pasa por P. El origen O de nuestro sistema está en el centro de masa (xcm= ycm = zcm= 0). El eje de por el centro de masa pasa por el punto O. ∑m (x n 2 n + y n2 ) = Icm n =1 N 2a ∑ mn xn = 2axcm = 0 El eje paralelo pasa por el punto P, cuyas coordenadas (x, y) son (a,b). n =1 N 2b ∑ mn y n = 2by cm = 0 La distancia entre este eje y el eje que pasa por centro de masa es d, donde n =1 N d = a2 + b2 Considere una partícula de masa mn, a distancias xn, yn y zn del origen O. El momento de inercia Icmn en torno al centro de masa es: Icmn = mn ( x n2 + y n2 ) El momento de inercia IPn en torno a P es: 2 2 IPn = mn ( xn − a ) + ( y n − b ) ∑ m (a n n =1 2 N N n =1 n =1 + b 2 ) = ∑ mnd 2 =d 2 ∑ mn =Md 2 Finalmente, IP = I cm +Md 2 , con lo que queda demostrado el teorema de los ejes paralelos. B) 2º Principio de Newton para Rotación Considere el cuerpo rígido de la figura 8, formado por N partículas, cada una de masa mn y a distancia rn del centro de giro 0, y que sufre una fuerza neta Fn . 7 8 Física General I Paralelos 05 y 22. Profesor RodrigoVergara R La fuerza neta se descompone en una componente radial Fradn , que no ejerce torque, y en una componente tangencial Ftann , que si ejerce torque. La 2º Ley de Newton para la componente tangencial es, en magnitud: Física General I Paralelos 05 y 22. Profesor RodrigoVergara R Así, se llega a la 2º Ley de Newton para la rotación de un cuerpo rígido. ∑τ = I ⋅ α Enunciado: La suma de los torques aplicados al cuerpo es igual al producto de su momento de inercia y su aceleración angular. Ftan n = mn ⋅ atan n Dado que es un cuerpo rígido, todas las partículas tienen la misma aceleración angular α. La aceleración tangencial de la n-ésima partícula se puede expresar en función de la aceleración angular como: C) Movimiento combinado de traslación y rotación. Cuando una rueda está rodando, experimenta simultáneamente una traslación y una rotación en torno a su eje. Así, el movimiento de cuerpos que ruedan es la combinación de un movimiento de traslación y de uno de rotación. Sin embargo, también se puede analizar el problema de un cuerpo que rueda como si su movimiento fuera de rotación pura. atan n = rn ⋅α Reemplazando, se llega a: Ftann = mn ⋅ rn ⋅ α Figura 8) Demostración del 2º Principio de Newton para Rotación Multiplicando a ambos lados por rn, se llega a: Ftann ⋅ rn = mn ⋅ rn2 ⋅ α Por definición: τ n = Ftan n ⋅ rn Donde τn es el torque aplicado sobre la n-ésima partícula. Luego Considere el cilindro de radio basal R y masa M que rueda en una superficie horizontal mostrado en la figura 9. En un instante cualquiera, la parte baja del cilindro se encuentra en reposo en la superficie, puesto que no desliza. El eje normal al plano de la Figura 9) Cuerpo rodando figura que pasa por el punto de contacto P se llama eje instantáneo de rotación. En ese instante, la velocidad lineal de toda partícula del cilindro tiene una dirección perpendicular a la línea que una la partícula con P, y su magnitud es proporcional a esa distancia. Esta situación equivale a decir que, en ese instante, el cilindro gira alrededor de un eje fijo que pasa por P con una cierta velocidad angular ω. Luego, en un instante dado, el movimiento del cuerpo es equivalente a una rotación pura. Luego, la energía cinética total es: τ n = m n ⋅ rn2 ⋅ α K= 1 IP ω 2 2 Sumando los torques sobre las N partículas N N ∑τ = ∑ m n n =1 n =1 ⋅ rn2 ⋅α = α ∑ mn ⋅ rn2 n =1 N n Como vimos en la sección anterior, I = ∑ mn ⋅ rn2 n =1 N Donde I es el momento de inercia total del cuerpo rígido Donde IP es el momento de inercia con respecto al eje que pasa por P. Del teorema de los ejes paralelos: IP = Icm + MR 2 Donde Icm es el momento de inercia del cilindro de masa M y radio R con respecto a un eje paralelo que pasa por su centro de masa. Reemplazando, la energía cinética total queda: K= 1 ( Icm + MR 2 )ω 2 = 12 Icmω 2 + 12 MR 2ω 2 2 9 10 Física General I Paralelos 05 y 22. Profesor RodrigoVergara R Como la velocidad del centro de masa con respecto a P es igual que la velocidad de P con respecto al centro de masa, la velocidad angular del centro de masa con respecto a P es igual que la velocidad angular de P con respecto al centro de masa. Si ωR=vcm es la velocidad con que se está moviendo el centro de masa del cilindro con respecto a P: K= 1 1 2 Icmω 2 + M ⋅ v cm 2 2 Este resultado se puede interpretar de la siguiente manera: K = K tras + K rot Donde 1 2 M ⋅ v cm Energía cinética asociada al movimiento de traslación 2 1 = Icmω 2 Energía cinética asociada al movimiento de rotación 2 • K tras = • K rot Así, tal como se muestra en la figura 10, los efectos combinados de la traslación del centro de masa y de la rotación en torno a un eje que pase por el Figura 10) Movimiento combinado de rotación y traslación como centro de masa son movimiento de rotación pura. equivalentes a una rotación pura con la misma velocidad 2 ⋅ v cm angular con respecto a un eje que pasa por el punto de contacto de un cuerpo que va rodando. Con referencia a la figura 11, se puede establecer que en el punto Q Física General I Paralelos 05 y 22. Profesor RodrigoVergara R v v P = v cm − ω R = v cm − cm R = 0 R D) Trabajo y Energía en el Movimiento de Rotación Una fuerza tangencial que actúa sobre un cuerpo en rotación efectúa un trabajo Suponga que una fuerza tangencial Ftan actúa en el borde de una rueda pivotante, como por ejemplo la niña que corre empujando el tiovivo mostrada en la figura 12ª, y cuyo esquema se muestra en la figura 12b. (a) (b) Figura 12) Niña empujando un tiovivo. (a) retrato de la situación; (b) esquema de la situación La rueda gira un ángulo infinitesimal dθ alrededor de un eje fijo un tiempo infinitesimal dt. El trabajo dW efectuado por la fuerza Ftan mientras un punto del borde se mueve una distancia ds es: dW = Ftands Si dθ se mide en radianes, ds = R·dθ , por lo que dW = Ftan Rdθ v cm Como τ = Ftan·R, se tiene que: v v Q = v cm + ω R = v cm + cm R = 2v cm R dW = τ dθ Integrando sobre un desplazamiento entre θ1 y θ2: En el punto C v C = v cm + 0 = v cm Figura 11) Cuerpo en movimiento combinado de rotación y traslación θ2 W = ∫ τ dθ θ1 En el punto P Para torque de magnitud constante 11 12 Física General I Paralelos 05 y 22. Profesor RodrigoVergara R Física General I Paralelos 05 y 22. Profesor RodrigoVergara R τ = −k θ W = τ ( θ2 − θ 1 ) = τ ⋅ ∆θ Usando la 2º Ley de Newton para rotación, con I momento de inercia constante y α aceleración angular constante: dW = τ dθ = Iα dθ = I dω dθ dθ = I dω = Iω dω dt dt La constante κ se llama “constante de torsión” y depende de las propiedades del alambre. El signo menos indica que el torque neto tiene sentido opuesto al desplazamiento angular. (Torque restaurador) Aplicando el 2º Principio de Newton para rotaciones, vemos que la ecuación de movimiento para este sistema es: Desarrollando la Integral τ = Iα = I ω2 W = ∫ Iω dω = ω1 1 2 1 2 Iω 2 − Iω1 2 2 Reemplazando Que es el teorema del trabajo y la energía para la rotación de un cuerpo rígido. −κθ = I Dividiendo dW = τ dθ por dt, nos queda dW dθ =τ dt dt d 2θ d 2θ κθ ⇒ 2 =− 2 dt dt I Esta ecuación es la de un movimiento armónico simple (MAS) angular. Es análoga a la del MAS lineal, pudiendo encontrarse las siguientes correspondencias con el sistema masa-resorte Péndulo de Torsión Desplazamiento (x) Masa (m) Constante de elasticidad del resorte (k) Como dW/dt es la potencia P y dθ/dt es la velocidad angular ω, se llega finalmente a que P = τω E) MAS Rotacional d 2θ dt 2 Sistema Masa-Resorte Ángulo (θ) Momento de Inercia (I) Constante de torsión del resorte (κ) Así, por simple analogía, se pueden establecer los siguientes parámetros: Péndulo de Torsión) • Posición angular en función del tiempo: θ ( t ) = θ0 ·cos (ω ⋅ t + δ ) Es un disco suspendido de un alambre fijo al centro de masa del disco, como el ilustrado en la figura 13. El alambre está firmemente unido a un soporte sólido y al disco. En la posición de equilibrio del disco se traza una línea radial desde el centro hasta P, como se muestra en la figura. • Frecuencia angular: ω = • Frecuencia de oscilación: f = Si el disco se hace girar en un plano horizontal hasta la posición radial Q, el alambre se tuerce. El alambre torcido ejercerá un momento de rotación sobre el disco, tendiendo a regresarlo a la posición P. Este es un momento de rotación (torque) restaurador. Para pequeñas torsiones se encuentra que el momento Figura 13) Péndulo de Torsión restaurador es proporcional al momento de la torsión, o sea, al desplazamiento angular (ley de Hooke para rotaciones), de manera que: • κ I . κ 1 2π Período de oscilación: T = 2π I I κ Péndulo Físico o Real Es un cuerpo rígido cualquiera instalado de manera que pueda oscilar en un plano vertical en torno de algún eje que pase por éste. Es una generalización del péndulo simple. Para pequeñas oscilaciones, el análisis casi tan fácil como el de éste. Para el péndulo real de la figura 14, se definen: Figura 14) Péndulo físico 13 14 • • • • • Física General I Paralelos 05 y 22. Profesor RodrigoVergara R m: masa del péndulo θ: Ángulo de giro. O: eje de giro I: Momento de inercia del cuerpo alrededor de O. d: distancia de O al centro de masa En la posición de equilibrio, el centro de masa está exactamente debajo del pivote O. Cuando el péndulo se desplaza a la posición mostrada en la figura y se suelta, el peso mg causa un torque de restitución: τ = −m ⋅ g ⋅ d ⋅ sin ( θ ) Para valores pequeños de θ, sin(θ) ≈ θ, el movimiento es aproximadamente MAS τ ≈ −m ⋅ g ⋅ d ⋅ θ La ecuación del movimiento es: d 2θ ∑ τ = Iα = I dt 2 Reemplazando d 2θ d 2θ mgd ⇒ 2 =− θ 2 dt dt I Esta ecuación es la de un movimiento armónico simple (MAS) angular. Es análoga a la del MAS lineal, pudiendo encontrarse las siguientes correspondencias con el sistema masa-resorte −m ⋅ g ⋅ d ⋅ θ = I Péndulo Físico Desplazamiento (x) Masa (m) Constante de elasticidad del resorte (k) Sistema Masa-Resorte Ángulo (θ) Momento de Inercia (I) Producto m·g·d Así, por simple analogía, se pueden establecer los siguientes parámetros: • • • Posición angular en función del tiempo: θ ( t ) = θ0 ·cos (ω ⋅ t + δ ) mgd I 1 Frecuencia de oscilación: f = 2π Frecuencia angular: ω = mgd I Física General I Paralelos 05 y 22. Profesor RodrigoVergara R • Período de oscilación: T = 2π I mgd De la ecuación del período del péndulo se puede despejar el momento de inercia del cuerpo. T = 2π I T 2 mgd ⇒I = mgd 4π 2 donde el período, la masa y la distancia al centro de masa se pueden medir directamente. Con esta ecuación podemos calcular el momento de inercia de cualquier cuerpo, pues basta hacer oscilar el cuerpo en torno a cualquier punto distinto al centro de masa, medir T, m y d y hacer el cálculo respectivo.