1 Encoder absoluto multivuelta CSM58
Anuncio

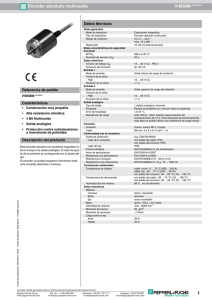
Encoder absoluto multivuelta CSM58 Datos técnicos Datos generales Modo de detección Tipo de dispositivo Datos característicos de seguridad funcional MTTFd Duración de servicio (TM) L10h Factor de cobertura de diagnóstico (DC) Datos eléctricos Tensión de trabajo UB Corriente en vacío I0 Retardo a la disponibilidad tv Linearidad Código de salida Desarrollo del código (dirección de contaje) Referencia de pedido CSM58 Características • Carcasa industrial estándar de Ø58 mm • Eje hueco insertable Interface Tipo de Interfaz Resolución Monovuelta Multivuelta Resolución total Cuadencia de la transferencia Conformidad con estándar • 30 Bit Multivuelta • Interface CAN desacoplado galvánicamente • 2 conmutadores terminales • 8 levas de conmutación programables • Salida de velocidad y aceleración • Transmisión de datos de procesamiento dirigido por eventos Fecha de publicación: 2016-02-16 16:48 Fecha de edición: 2016-02-16 t49163_spa.xml Descripción del producto Los encoders absolutos ofrecen un valor de paso absoluto por cada ángulo. Todos estos valores se representan como muestras en código en uno o varios discos de códigos, los cuales se consultan ópticamente. El encoder absoluto tiene una resolución básica máxima de 65.536 pasos por vuelta (16 bits). En la versión multivuelta se ofrece una resolución de hasta 16.384 vueltas (14 bits). El resultado de todo ello es una resolución total de un máximo de 1073741824 pasos (30 bits). La interface CAN-Bus integrada del encoder absoluto admite todas las funciones CANopen. Esto permite programar los siguientes modos de funcionamiento que pueden activarse o desactivarse de manera opcional: • Modo polarizado • Modo cíclico • Modo sincronizado El encoder absoluto se monta directamente (por tanto, sin embrague) en el eje de aplicación. La rotación del encoder absoluto se evita mediante un soporte del momento de torsión. La electrónica del bus está integrada en la tapa desmontable de la carcasa. De esta manera, se puede montar o sustituir por separado la electrónica del bus y el encoder durante el montaje o el mantenimiento. Conexión Compartimento de terminales Conformidad con estándar Grado de protección Control climático Aviso de perturbación Resistencia a la perturbación Resistencia a choques Resistencia a las vibraciones Condiciones ambientales Temperatura de trabajo Temperatura de almacenaje Datos mecánicos Material Combinación 1 Combinación 2 (Inox) Masa Velocidad de rotación Momento de inercia Momento de arranque Momento de apriete de los tornillos de fijación Carga sobre el eje Desplazamiento angular Desplazamiento axial Distancia radial Exploración fotoeléctrico Encoder absoluto multivuelta 70 a 20 a 1,9 E+11 bei 6000 min-1 und 20/40 N axialer/radialer Wellenbelastung 0% 10 ... 30 V CC máx. 230 mA a 10 V CC max. 100 mA a 24 V CC < 250 ms ± 2 LSB a 16 Bit, ± 1 LSB a 13 Bit, ± 0,5 LSB a 12 Bit Código binario cw ascendente (si gira en sentido horario el código asciende) cw descendente (si gira en sentido horario el código desciende) CANopen hasta 16 Bit 14 Bit hasta 30 Bit máx. 1 MBit/s Perfil de comunicación: DS 301 Perfiles de los equipos: DS 406 y DS 417 , programable según clase 2 en cubierta movible DIN EN 60529, IP65 IP66 (con anillo de retención) DIN EN 60068-2-30 , sin aturdimiento EN 61000-6-4:2007 EN 61000-6-2:2005 DIN EN 60068-2-27, 100 g, 6 ms DIN EN 60068-2-6, 20 g, 10 ... 2000 Hz -40 ... 85 °C (-40 ... 185 °F) -40 ... 85 °C (-40 ... 185 °F) Carcasa: Aluminio, recubierto de polvo Brida: Aluminio Onda: Acero inoxidable Carcasa: Acero inoxidable Brida: Acero inoxidable Onda: Acero inoxidable aprox. 600 g (combinación 1) aprox. 1200 g (combinación 2) máx. 12000 min -1 30 gcm2 ≤ 3 Ncm (Versión sin anillo-retén) máx. 1,8 Nm ± 0,9 ° estático: ± 0,3 mm, dinámico: ± 0,1 mm estático: ± 0,5 mm, dinámico: ± 0,2 mm Autorizaciones y Certificados Autorización UL Consulte "Notas generales sobre la información de los productos de Pepperl+Fuchs". EE. UU.: +1 330 486 0001 Pepperl+Fuchs Group Alemania: +49 621 776-1111 www.pepperl-fuchs.com [email protected] [email protected] cULus Listed, General Purpose, Class 2 Power Source Singapur: +65 6779 9091 [email protected] 1 Encoder absoluto multivuelta CSM58 Dimensiones 72 L 5 27.5 ø 63 20 20° 88 Profundidad máx. de encaje de ejes = 30 Profundidad mín. de encaje de ejes = 15 R 1.6 25 Angulo de equipo a apoyo de momentos ø 59 ø 58 2.5 12.7 L: Singleturn = 87 Multiturn = 98 40 60 CONEXIÓN ELÉCTRICA Terminal Cable ⊥ - Explicación (+) rojo Tensión de alimentación (-) negro Tensión de alimentación Conexión a masa para tensión de alimentación G - L azul CAN Ground CAN Low H blanco CAN High - L azul CAN Ground CAN Low H blanco CAN High Fecha de publicación: 2016-02-16 16:48 Fecha de edición: 2016-02-16 t49163_spa.xml G 2 Consulte "Notas generales sobre la información de los productos de Pepperl+Fuchs". EE. UU.: +1 330 486 0001 Pepperl+Fuchs Group Alemania: +49 621 776-1111 www.pepperl-fuchs.com [email protected] [email protected] Singapur: +65 6779 9091 [email protected] Encoder absoluto multivuelta CSM58 Indicadores y elementos de manejo Resistencia terminal + Bus In Indicador de estado LED verde RT ON Tensión de alimentación Interface RS 485 G L H G L 9 01 9 01 9 01 2 8 2 8 2 8 3 7 3 7 3 7 6 54 6 54 6 54 Bd x10 Indicaciones de errores LED rojo Err H x1 CAN Run Bus Out Direccionamiento Velocidad de transmisión Ajuste de la dirección de la estación Ajuste la dirección de la estación mediante el interruptor giratorio. La dirección puede definirse entre 1 y 96 y solo puede asignarse una vez. Las direcciones 97 ... 99 están reservadas. Ajuste de la resistencia terminal Estación X Con el conmutador deslizante RT se conecta adicionalmente la resistencia terminal (121 Ω): ON RT ' & ! % $ #" ' & ! % $ #" N N última estación ON RT Ajuste de la velocidad de transmisión Velocidad de transmisión [Kbit/s] 20 50 100 125 250 Posición del interrupVelocidad de transmisión [Kbit/s] Posición del interruptor tor giratorio giratorio 0 500 5 1 800 6 2 1000 7 3 reservado 8 4 Ajuste de la velocidad de transmisión mediante men9 saje SDO y LSS Indicadores LED Fecha de publicación: 2016-02-16 16:48 Fecha de edición: 2016-02-16 t49163_spa.xml CAN Run (verde) parpadea parpadea Flash simple Flash doble Flash triple encendido Err (rojo) apagado parpadea parpadea Flash simple Flash doble Flash triple Flash cuádruple encendido Estado Velocidad de transmisión de bits automática / LSS Pre-operativo detenido Significado La detección automática de velocidades de transmisión o el servicio LSS funciona Estado ningún error Velocidad de transmisión de bits automática / LSS Configuración no válida Límite de alerta alcanzado Significado El encoder funciona sin errores La detección automática de velocidades de transmisión o el servicio LSS funciona Encoder en estado Pre-operativo Encoder en estado Detenido reservado Descarga de programas/firmware Se lleva a cabo la descarga del software al encoder en funcionamiento Funcionamiento normal, encoder en estado Operativo. Error de configuración general Como mínimo uno de los contadores de errores del programador CAN ha alcanzado o superado el límite de alerta (demasiados Error-Frames). Error Se ha producido un incidente de protección (esclavo NMT o maestro NMT) o un incidente heartbeat (heartbeat consumer). Error de sincronización No se ha recibido ningún mensaje de sincronización (véase objeto 1006h) dentro del Timeout del ciclo de comunicación configurado Error, temporizador de incidentes No se ha recibido el PDO esperado antes del transcurso del temporizador de incidentes Error de bus El programador CAN no está conectado al bus Consulte "Notas generales sobre la información de los productos de Pepperl+Fuchs". EE. UU.: +1 330 486 0001 Pepperl+Fuchs Group Alemania: +49 621 776-1111 www.pepperl-fuchs.com [email protected] [email protected] Singapur: +65 6779 9091 [email protected] 3 Encoder absoluto multivuelta CSM58 Modos de funcionamiento CAN programables Modo Explicación Modo polarizado El host conectado consulta mediante un telegrama de petición de transmisión remota el valor efectivo de posición actual. El encoder absoluto lee la posición actual, calcula posibles parámetros establecidos y devuelve a través del mismo identificador CAN el valor efectivo de proceso. Modo cíclico El encoder absoluto envía de manera cíclica, sin solicitarlo a través del host, el valor efectivo actual de proceso. La duración de ciclo se puede programar en milisegundos para valores entre 1 ms y 65536 ms. Modo sincronizado Tras recibir el telegrama de sincronización a través del host, el encoder absoluto envía el valor efectivo actual de proceso. En caso de que sean varios nodos los que deban responder al telegrama de sincronización, cada uno de los nodos se registra secuencialmente en función de su identificador CAN. La programación de un tiempo preajustado deja de tener lugar. El contador de sincronización se puede programar de tal modo que el encoder realice envíos tras un número determinado de telegramas sincronizados. Parámetros programables del encoder Parámetro Explicación Como parámetro de funcionamiento se puede parametrizar el sentido de giro (complemento). Este parámetro determina el sentido de giro en el que debe subir o bajar el código de salida. Resolución por vuelta El parámetro “Resolución” se utiliza para programar el encoder de tal modo que se pueda realizar la cantidad deseada de pasos con respecto a una vuelta. Resolución total Este parámetro indica la cantidad deseada de unidades de medición de toda la longitud de desplazamiento. Este valor no debe sobrepasar la resolución total del encoder absoluto. Valor preconfigurado El valor preconfigurado es el valor de posición deseado que se debe alcanzar con una determinada posición física del eje. Mediante el valor preconfigurado de los parámetros se ajusta el valor efectivo de posición al valor efectivo del proceso deseado. 2 interruptores finales Se pueden programar 2 posiciones que cuando no se alcanzan o se sobrepasan, el encoder absoluto registra un bit en High en el valor efectivo de proceso de 32 bits. 8 levas de avance Se pueden programar ocho valores de posición como levas. Al alcanzar dichos valores, se establecen bits en el registro de estado de levas del objeto 6300h. Fecha de publicación: 2016-02-16 16:48 Fecha de edición: 2016-02-16 t49163_spa.xml Parámetro de funcionamiento 4 Consulte "Notas generales sobre la información de los productos de Pepperl+Fuchs". EE. UU.: +1 330 486 0001 Pepperl+Fuchs Group Alemania: +49 621 776-1111 www.pepperl-fuchs.com [email protected] [email protected] Singapur: +65 6779 9091 [email protected] Encoder absoluto multivuelta CSM58 Referencia de pedido C S M 5 8 – R 0 B N – Número de bits singleturn 12 4096 (estándar) 13 8192 16 65536 Número de bits multiturn 12 4096 (estándar) 14 16384 Opción 2 N no ampliada Código emisor B binario Opción 1 0 ninguno Salida R radial Tipo de conexión AG Tapa de carcasa desmontable con zona de terminales AN Tapa de carcasa desmontable con conectores enchufables M12 x 1 Dimensión de eje/tipo de brida F1A Eje hueco encajable Ø10 mm x 30 mm F2A Eje hueco encajable Ø12 mm x 30 mm F3A Eje hueco encajable Ø15 mm x 30 mm Material de carcasa N aluminio, recubrimiento pulverizado Í INOX W aluminio, recubrimiento pulverizado con sello del eje Principio de funcionamiento M Multiturn Tipo de eje S Eje hueco encajable Formato de datos CAN-Bus Fecha de publicación: 2016-02-16 16:48 Fecha de edición: 2016-02-16 t49163_spa.xml C Consulte "Notas generales sobre la información de los productos de Pepperl+Fuchs". EE. UU.: +1 330 486 0001 Pepperl+Fuchs Group Alemania: +49 621 776-1111 www.pepperl-fuchs.com [email protected] [email protected] Singapur: +65 6779 9091 [email protected] 5