Juan Jacobo Yepes (201125376),Gabriel Andrés Franco (201124849)
Anuncio
,Gabriel Andrés Franco (201124849)")
Juan Jacobo Yepes (201125376),Gabriel Andrés Franco (201124849), Ana María
Hernández (200823426) y Mariana Vicaría (201023820)
Seminario de Matemáticas
Charla de Florent Schaffhauser
Grupos Fundamentales de Superficies
I - ¿Qué es una superficie?
La primera idea intuitiva al pensar en una superficie es la definición dada por
Euclides quien dijo que: “Una superficie es aquello que sólo tiene longitud y anchura”. De
ahí salen definiciones más formales como que una superficie es un conjunto de puntos,
bidimensional que en la localidad de un punto se parece (es homeomorfa) a un disco abierto
en el plano 2.
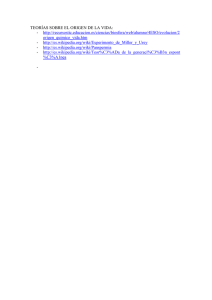
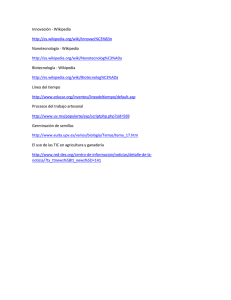
Hay dos tipos de superficies, las orientables donde toda curva cerrada simple (que
no se corta a si misma) contenida es homeomorfa a un cilindro abierto. Y las no orientables,
cuyas curvas cerradas simples son homeomorfas a una cinta de Möbius (una superficie con
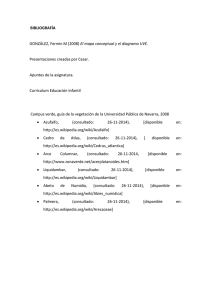
una sola imagen y un solo borde, imagen 4). Las siguientes son superficies orientables:
La esfera:
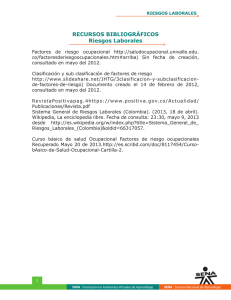
El toro (toroide):
Img 1
Img 2
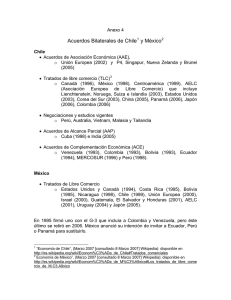
Y la suma conexa de toros:
Img 3
Las siguientes son superficies no orientables:
Cinta de Möbius:
Img 4
Botella de Klein:
Img 5
II - ¿Por qué asociarle un grupo a una superficie?
Por el problema de clasificación en matemáticas, que conciste en la cuestion de:
¿cuándo y cómo identificar dos superficies? La solución a este problema la dio Euler. La
caracteristica de Euler sale de restarle el numero de lados (aristas) a la suma entre
polígonos y vertices al poligonizar una superficie como un toro o una esfera.
•
•
La identidad de dos superfices X y Y cuando existe una biyección F:(X)à(Y)X
y Y tal que F sea continua y F-1 sea continua. Se dice que F es un
homeomorfismo y que X y Y son homeomorfas.
Cuando X y Y son homeomorfas existe algo que se denomina como una
invariante topológica que es una correspondencia Xàa(X) de tal manera que
X≈Y implica que a(X) ≈a(Y).
Ejemplos:
•
Conjuntos finitos:
o X≈Y implica |X|=|Y|. Se tiene una biyección tal que el ángulo orientado entre
dos rectas del plano es igual que en sus rectas inversas.
§ U(R1)=R1’
à angulo entre R1 y R2 = angulo entre R1’ y R2’ Є [0, π]
§ U(R2)=R2’
•
Dimension de un espacio vectorial:
p
o
≈ q implica q=p
Invariante topológico incompleto:
o X≈Y implica a(X) ≈a(Y) Si X y Y son espacios topológicos y a(X) será un
grupo. a es un invariente.
Invariante topológico completo:
o Cuando a(X)≈a(Y) implica X≈Y
•
•
III - ¿Cómo se les asigna un grupo?
El primer grupo de homotopía (una homotopía entre superficies se da cuando una de
ellas se puede deformar continuamente en la otra) de una superficie son los lazos brazados
(algo así como el circulo que queda de un corte sobre un punto en un toroide) en un punto.
Se sabe que los lazos brazados de un toroide son {F: F:[0,1]àX|F(0)=F(1)=X0 y F
es continua}.
Sea G otra función cualquiera:
F-1(t) := F (1-t)
0<=t<=1
(F*F-1) es homótopo al lazo constate y:tàX0
Ejemplos de grupos:
π
•
•
π
•
π
1 (S
2
; X0)=|[y]|
1 (S
1
;1) ≈ ℤ
1 (S
1
x S1; (1,1)) ≈ <a, b | a*b*a-­‐1*b-­‐1=1, a*b=b*a>= ℤ2
§
Consecuencia S2 ≠ S1 x S1.
Otras superficies y grupos:
•
π
1 (D
2
;X0) ≈ |[y]|
En general,
π no es un invariante completo.
Una homotopía es una deformación continua de caminos
Homotopo:
No homotopo:
H = [0,1] x [0,1] à X (S,t) à H (S,t) Es continua Tal que: H(0,t) =
0(t)
H(1,t) =
1(t)
H(S,0) = H(S, 1) = X0
Definicion de
π
1 (X; X0): Es el conjunto de clases de homotopía de lazos basados en X0. Bibliografía:
•
•
•
•
•
•
•
•
•
•
[Consultado 15/11/2011] <http://es.wikipedia.org/wiki/Topolog%C3%ADa>
[Consultado 15/11/2011]
<http://es.wikipedia.org/wiki/Topolog%C3%ADa_geom%C3%A9trica>
[Consultado 15/11/2011] <http://es.wikipedia.org/wiki/Toroide>
[Consultado 15/11/2011]
<http://es.wikipedia.org/wiki/Toro_%28geometr%C3%ADa%29>
[Consultado 15/11/2011] <http://www.ual.es/~jlrodri/Topgen5/introduccion.html>
[Consultado 15/11/2011]
<http://es.wikipedia.org/wiki/Superficie_%28matem%C3%A1tica%29>
[Consultado 15/11/2011] <http://es.wikipedia.org/wiki/Banda_de_M%C3%B6bius>
[Consultado 15/11/2011]
<http://es.wikipedia.org/wiki/Superficie_%28matem%C3%A1tica%29#Superficies_orienta
bles>
[Consultado 15/11/2011] <http://es.wikipedia.org/wiki/Caracter%C3%ADstica_de_Euler>
[Consultado 15/11/2011] <http://es.wikipedia.org/wiki/Homotop%C3%ADa>