Document
Anuncio

Teoría de Sistemas y Señales
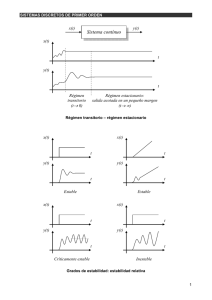
Respuesta al escalón de
sistemas de 2do orden
Autor: Franco N. Ferrucci
Sistemas Continuos de 2º Orden
• Función Transferencia:
ω
ω
G ( s) = 2
=
2
s + 2ξωn s + ωn ( s − p1 ) ⋅ ( s − p2 )
2
n
2
n
con:
ξ : coeficiente de amortiguamiento
ωn : pulsación natural (no amortiguada)
p1,2 : polos del sistema
• Polos:
s + 2ξωn s + ω = 0
2
2
n
Aplicando la resolvente:
p1,2 = −ξ ωn ± ωn ξ − 1
2
2
Si ξ − 1 < 0 , entonces:
p1,2 = −ξ ωn ± jωn 1 − ξ
2
Caso Sobre-amortiguado
ξ2-1 > 0
ℑ
p1
ℜ
p2
Caso Sub-amortiguado
ξ2-1 < 0
ℑ
ℑ
ℜ
p1≡p2
Caso Sin Amortiguamiento
ξ=0
ℑ
j ωn 1 − ξ 2 = jωa
p1
Caso Crítico
ξ2-1 = 0
p1
j ωn
ωn
β
−ξωn
p2
ℜ
ℜ
p2
− j ωn
• Respuesta al escalón:
μ(t )
u (t ) = μ (t )
G (s)
y (t )
1
→ U (s) =
s
+∞
y (t ) =
∫ g (τ ) μ (t − τ ) dτ
→ Y (s) = G (s)U ( s)
−∞
Reemplazando G(s), tenemos:
ωn2
1
Y ( s) =
→
2
2
s s + 2ξωn s + ωn
y (t ) =
L -1 {Y (s)}
Dependiendo de la ubicación de los polos de G(s) tendremos
diferentes respuestas de y(t).
• Caso Sobre-amortiguado:
p1,2 = −ξ ωn ± ωn ξ 2 − 1 ,
p1,2 ∈ \
ωn2
A
B
C
pt
p t
Y (s) =
= +
+
→ y (t ) = A + B e 1 + C e 2
s ⋅ ( s − p1 ) ⋅ ( s − p2 ) s s − p1 s − p2
A = lim sY ( s ) = 1
s →0
B = lim ( s − p1 ) Y ( s ) =
s → p1
C = lim ( s − p2 ) Y ( s ) =
s → p2
ωn2
p1 ( p1 − p2 )
ωn2
p2 ( p2 − p1 )
Reemplazando, tenemos:
ωn2
⎛ 1 p1t 1 p 2t ⎞
y (t ) = 1 +
⎜ e − e ⎟
p1 − p2 ⎝ p1
p2
⎠
Las condiciones iniciales son:
TVI
↓
y (0+ ) = lim sY ( s ) = 0
s →∞
TVI
↓
ωn2
'∞ '
=
= lim
= lim
=0
y (0 ) = lim s [ sY ( s ) ] = lim 2
→∞
s →∞ s
s →∞ s + 2ξωn s + ωn2 ' ∞ ' s →∞ d 2
2
+
2
ξω
s
n
s + 2ξωn s + ωn2 )
(
⎧ dy ⎫
L⎨ ⎬
ds
⎩ dt ⎭
+
sω
d
s ωn2 )
(
ds
L'H
↓
2
n
y(t)
1
←ξ = 1,1
0.8
←ξ = 2
←ξ = 3
←ξ = 4
0.6
0.4
ωn = 1, 0
0.2
0
0
2
4
6
Tiempo (seg.)
8
10
• Caso Amortiguamiento Crítico:
p1,2 = − ωn
ξ =1
ωn2
A
B
C
1
− ωn t
− ωn t
Y (s) =
=
+
+
→
y
(
t
)
=
A
+
B
e
+
C
t
e
s ( s + ωn ) 2 s ( s + ωn ) ( s + ωn ) 2
A = lim sY ( s ) = 1
s →0
d
⎡⎣ ( s + ωn ) 2 Y ( s ) ⎤⎦ = −1
B = lim
s →−ωn ds
C = lim ( s + ωn ) 2 Y ( s ) = −ωn
ωn
1
1
Y ( s) = −
−
s ( s + ωn ) ( s + ωn ) 2
s →−ωn
Antitransformando, queda:
y (t ) = 1 − e
− ωn t
− ωn t e
− ωn t
Evoluciones temporales (amotiguamiento crítico):
y(t)
1
ωn = 4→
0.8
←ωn = 3
←ωn = 2
0.6
←ωn = 1
0.4
0.2
0
0
1
2
3
Tiempo (seg.)
4
5
• Caso Sub-amortiguado:
p1,2 = −ξ ωn ± j ωn 1 − ξ 2
Y (s) =
ω
ωa
2
n
s ⋅ ( s − p1 ) ⋅ ( s − p2 )
=
(polos complejos conjugados)
A
B
C
+
+
s s − p1 s − p2
→ y (t ) = A + B e
p 1t
+Ce
p 2t
A = lim sY ( s ) = 1
s →0
B = lim ( s − p1 )Y ( s ) =
s → p1
1
1 ξ
=− + j
p1 ( p1 − p2 )
2
2 1− ξ 2
C = lim ( s − p2 )Y ( s ) =
s → p2
y (t ) = 1 + B e
p 1t
ωn2
+Ce
ωn2
1
1 ξ
=− − j
= B*
2
p2 ( p2 − p1 )
2
2 1− ξ
p 2t
= 1+ B e
p 1t
+B e
*
p1*t
= 1+ B e
⎧⎪⎛ 1
1 ξ
y (t ) = 1 + 2 ⋅ℜ { B e } = 1 + 2 ⋅ℜ ⎨⎜ − + j
2 1− ξ 2
⎪⎩⎜⎝ 2
p1t
y (t ) = 1 − e
−ξωn t
⎛
⎞
ξ
⎜ cos(ωa t ) +
sin(ωa t ) ⎟
2
⎜
⎟
1− ξ
⎝
⎠
p 1t
+ (Be
)
p1t *
⎫⎪
⎞ −ξω t
n
⎟⋅e
⋅ ( cos(ωa t ) + j sin(ωa t ) ) ⎬
⎟
⎠
⎭⎪
y (t ) = 1 − e
−ξωn t
⎛
⎞
ξ
⎜ cos(ωa t ) +
sin(ωa t ) ⎟
2
⎜
⎟
1− ξ
⎝
⎠
Teniendo en cuenta que:
u ⋅ cos α + v ⋅ sin α = (u , v) • ( cos α ,sin α )
(
= ( u , v ) ⋅ ( cos α ,sin α ) ⋅ cos α − arctan v
podemos reescribir y(t):
y (t ) = 1 −
1
1− ξ
2
(
(
e −ξωnt cos ωa t − π − β
2
))
O bien:
y (t ) = 1 −
β = arctan
1
1− ξ 2
1− ξ 2
ξ
e −ξωnt sin (ωa t + β )
ωa = ωn 1 − ξ 2
u
),
Evolución temporal sub-amortiguada:
y(t)
y (∞ ) ⋅ e
−πξ
1−ξ 2
0, 05 ⋅ y (∞)
0
tP =
π
ωa
tST ≅
3
ξωn
Tiempo (seg.)
• Caso Sin Amortiguamiento:
p1,2 = ± j ωn
(polos imaginarios puros)
ξ =0
(*)
ω
ω
A B⋅s +C
Y (s) =
=
= + 2
2
2
s ⋅ ( s − jωn ) ⋅ ( s + jωn ) s ⋅ ( s + ωn ) s s + ωn2
2
n
2
n
A ⋅ ( s + ω ) + ( B ⋅ s + C ) ⋅ s ( A + B) ⋅ s + C ⋅ s + A ⋅ ω
=
=
2
2
s ⋅ ( s + ωn )
s ⋅ ( s 2 + ωn2 )
2
2
n
2
2
n
Comparando (*) y (**) tenemos que A = 1, B = -1 y C = 0.
Entonces:
1
s
Y (s) = − 2
s s + ωn2
→
y (t ) = 1 − cos(ωn t )
(**)
Evolución temporal (caso sin amortiguamiento):
y(t)
ωn = 1,0
2
1.6
1.2
0.8
0.4
0
0
2
4
6
8
Tiempo (seg.)
10
12
14
16
Rta. al escalón para distintos valores de ξ (ωn constante):
y (t )
2.5
ωn = 2, 0
ξ =0
2
0,1
0, 2
0,3
0, 4
0,5
1.5
0, 6
0, 7
1
0,8
1, 0
0.5
2, 0
0
-0.5
0
1
2
3
4
5
6
Tiempo ( seg.)
• Caso Sub-amortiguado. Ejemplos:
Ejemplo 1: ωa1=ωa2=ωa3
ℑ
j ωa1
ℜ
Tiempo
Al tener los sistemas igual frecuencia amortiguada ωa, el
tiempo de pico tP coincide en las tres evoluciones.
π
tP =
ωa
Ejemplo 2: ξ1=ξ2=ξ3
ℑ
β
ℜ
Tiempo
Los sistemas comparten el mismo ξ de modo que el sobrevalor
es el mismo en los tres casos. Recordemos que el SV sólo
depende de ξ:
−πξ
SV = e
1−ξ 2
Ejemplo 3: ξ1ωn1=ξ2ωn2
ℑ
ℜ
0
Tiempo
Los sistemas poseen polos con idéntica parte real
ℜ { pi } = −ξ ωn
por lo que el settling time tST coincidirá en ambas evoluciones.
tST5% ≅
3
ξωn