PRÁCTICAS VÍA INTERNET Célula de Clasificación
Anuncio

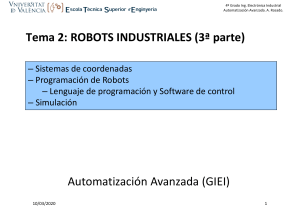
PRÁCTICAS VÍA INTERNET Célula de Clasificación Robot ABB Realizado: Laboratorio Remoto de Automática Versión: Páginas: (LRA-ULE) Grupo SUPPRESS Universidad de León (Supervisión, Automatización) Control y http://lra.unileon.es 1.0 12 1. Introducción En este documento se describe la topología del brazo robótico ABB IRB 1400 que se encuentra disponible en el laboratorio A4 del edificio tecnológico de Ingenierías de la Universidad de León. Este robot tiene la finalidad de trasladar cada uno de los perfiles de acero desde la mesa de origen hasta el principio de la cinta transportadora, justo debajo del sistema de visión, y posteriormente recoger los perfiles de los carriles de almacenamiento para situarlos de nuevo en la mesa de origen. Fig. 1 Vista general del brazo robótico ABB IRB 1400. 2. Objetivos de la práctica Los objetivos de esta práctica son los siguientes: Comprender el proceso llevado a cabo por el sistema. Reconocer cada una de las partes del robot ABB. Familiarizarse con el lenguaje de programación RAPID. Laboratorio Remoto de Automática de la Universidad de León. http://lra.unileon.es -1- 3. Descripción del sistema El brazo robótico ABB IRB 1400 está compuesto por dos sistemas, el manipulador y el sistema de control. Cada uno de estos sistemas realiza unas funciones determinadas que se detallan a continuación: Manipulador → Es el subsistema encargado de realizar los movimientos que el sistema de control le ordena. Puede moverse de 7 maneras diferentes seleccionables en la unidad de programación. Estos movimientos solo pueden seguir los 6 ejes que posee el manipulador, que definen perfectamente donde se encuentra el punto central de la herramienta en cada momento. En nuestro caso, este sistema ha sido dotado de un conjunto de herramientas formado por una ventosa de succión conectada a un generador de vacío y una pinza neumática de apertura paralela de la compañía SMC. Ambos componentes se han montado para una recogida eficaz de las piezas que se van a manipular. Fig. 2 Herramientas acopladas al brazo manipulador. Fig. 3 Bornero de válvulas y generador de vacío. Las herramientas del Robot ABB pueden ser utilizadas gracias a la instalación de un grupo de válvulas de control que se encargan de abrir/cerrar la pinza, y encender/apagar el vacío de la ventosa. En la imagen de la figura 3 se puede apreciar los tubos que transportan el aire (color verde), los cables de señal que van del sistema de control al bornero del PLC (color naranja), y los que van a cada elemento electroneumático (color azul). Laboratorio Remoto de Automática de la Universidad de León. http://lra.unileon.es -2- Sistema de control → Es el subsistema encargado de la alimentación del brazo robótico y del control del mismo. Está constituido por dos elementos principales, el panel de control y la unidad de programación. Fig. 4 Sistema de control. Fig. 5 Panel de control. Fig. 6 Unidad de programación. Laboratorio Remoto de Automática de la Universidad de León. http://lra.unileon.es -3- En el panel de control (figura 5) nos encontramos con algunas de las medidas de seguridad del brazo robótico, tales como el paro de emergencia y los modos de funcionamiento, representados por un selector con una llave. La unidad de programación (figura 6) permite programar el brazo robot para que ejecute las órdenes que nos interesan. Está compuesta por un conjunto de teclas, una pantalla de visualización, una palanca de mando, un dispositivo de habilitación y un botón de paro de emergencia. 4. Tareas a realizar Las tareas a realizar en esta práctica se enumeran a continuación: 1. Acceder a la página lra.unileon.es, en el apartado Sistemas/Célula Robotizada y leer la información que contiene cada una de las pestañas. En esta página se puede descargar un manual de usuario del robot ABB IRB 1400. 2. Reconocer cada una de las partes del robot y rellenar la siguiente tabla: ROBOT ABB IRB 1400 Elemento Función Brazo Manipulador Armario de Control Laboratorio Remoto de Automática de la Universidad de León. http://lra.unileon.es -4- 3. Reconocer el fragmento de código RAPID que aparece en la figura 7 explicando posteriormente las acciones asociadas a las cuatro primeras instrucciones. CASE 1: MoveJ r_a_1,v300,z10,tool0; MoveL r_a_2,v100,fine,tool0; Set sal_2; WaitTime 1.5; MoveL r_a_1,v100,z10,tool0; MoveJ r_a_3,v300,z10,tool0; MoveJ r_rampa,v500,z50,tool0; MoveJ r_cinta,v500,z50,tool0; MoveJ r_mesa,v500,z50,tool0; MoveJ v_1_1,v300,z10,tool0; MoveJ v_1_2,v100,fine,tool0; MoveJ v_1_3,v50,fine,tool0; Reset sal_2; WaitTime 1; MoveJ v_1_4,v50,fine,tool0; MoveL v_1_5,v100,z10,tool0; MoveJ pos_0,v500,z10,tool0; Fig. 7 Fragmento de código RAPID Ayuda: El lenguaje RAPID consta en una serie de instrucciones utilizadas para la programación de las acciones que va a llevar a cabo el brazo robótico. Una de las instrucciones más utilizadas es la instrucción de posicionamiento cuya topología se especifica en la figura 8. Fig. 8 Topología de la instrucción Move Laboratorio Remoto de Automática de la Universidad de León. http://lra.unileon.es -5-