Programación de autómatas: Introducción al Grafcet
Anuncio

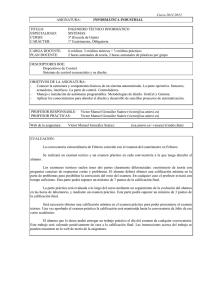
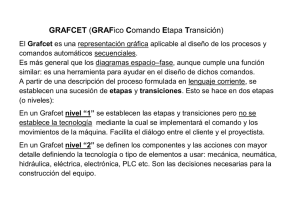
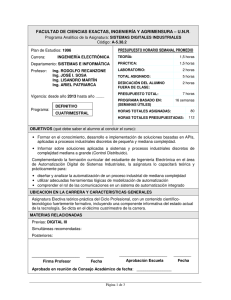
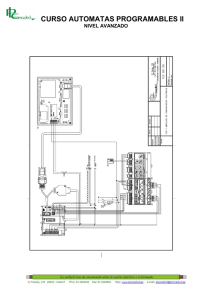
M- 0 0 B 1 M A⋅p M C BR Y M C BL 3 BR- BL+ Z Z 4 C+ BR+ 2 Y 3 M+ 1 A⋅p 2 SR- C- B M C SR X 4 BL- SR+ X Autómatas Programables ISA-UMH © TDOC-99 1 Programación de autómatas: Introducción al Grafcet n Introducción a la programación del autómata – Definición del sistema de control n n n n n n n n Descripciones literales Funciones algebraicas Esquemas de relés Diagramas lógicos Diagramas de flujo Grafcet Definir las variables que intervienen y asignarles direcciones de de memoria Lenguajes de programación n n n Lista de instrucciones Diagramas de contactos y funciones Lenguajes de alto nivel Autómatas Programables ISA-UMH © TDOC-99 2 1 Programación de autómatas: Introducción al Grafcet n Grafcet – – – – Introducción Símbolos normalizados Reglas de evolución del Grafcet Posibilidades de representación de automatismos con Grafcet n Estructuras base – Estructuras de secuencia única – Estructuras de secuencias paralelas n Estructuras lógicas – – – – – n Divergencia OR Convergencia OR Divergencia en AND Convergencia en AND Saltos Condicionales Ejemplo Autómatas Programables ISA-UMH © TDOC-99 3 Programación de autómatas: Introducción al Grafcet – – – Implementación del Grafcet sobre autómatas programables Niveles de Grafcet Representación de situaciones especiales en Grafcet n n Secuencias exclusivas Temporizadores y contadores en Grafcet Autómatas Programables ISA-UMH © TDOC-99 4 2 Programación de autómatas: Introducción al Grafcet n Introducción a la programación del autómata – Definición del sistema de control n n n n n n n n n Descripciones literales Funciones algebraicas Esquemas de relés Diagramas lógicos Diagramas de flujo Grafcet Definir las variables que intervienen y asignarles direcciones de de memoria Lenguajes de programación Grafcet Autómatas Programables ISA-UMH © TDOC-99 5 Introducción a la programación del autómata n Sistemas y recursos envueltos en la transferencia de información que rodean al autómata Análisis Especificaciones MODELO DE CONTROL Asignación de direcciones AUTÓMATA SISTEMA OPERATIVO Editor Monitor PROCESADOR PROCESO INTERFACES E/S MEMORIA DE PROGRAMA UNIDAD DE PROGRAMACIÓN Lenguaje de programación SEÑALES DE EMERGENCIA -Paradas de urgencia -Alarmas Autómatas Programables ISA-UMH © TDOC-99 PROGRAMA BINARIO 6 3 Introducción a la programación del autómata n Podríamos dividir la programación del autómata en varios pasos : – Definir el sistema de control ( que debe hacer, en que orden, etc.): etc.): diagrama de flujo, la descripción literal o un grafo GRAFCET. – Identificar las señales de entrada y salida del autómata. – Representar el sistema de control mediante un modelo, indicando todas las funciones que intervienen, las relaciones entre ellas, y la secuencia que deben seguir. Algebraica (instrucciones literales) o gráfica (símbolos gráficos). – Asignar las direcciones de entrada/salida o internas del autómata autómata a las correspondientes del modelo. – Codificar la representación del modelo. Lenguaje de programación. programación. – Cargar el programa en la memoria del autómata desde la unidad de programación. – Depurar el programa y obtener una copia de seguridad. Autómatas Programables ISA-UMH © TDOC-99 7 Introducción a la programación del autómata n Esquema del desarrollo de un proceso controlado por un autómata INICIO Documentación del proceso: -Memoria de funcionamiento -Planos -Etc. -Interpretación del proceso a controlar -Determinación de E/S, temporizadores, contadores, etc., necesarios -Elección del autómata -Asignación de E/S, temporizadores, contadores, etc., necesarios Autómatas Programables ISA-UMH © TDOC-99 8 4 Introducción a la programación del autómata -Programación : -Diagrama -Lista de instrucciones -Etc. -Esquema eléctrico: -de potencia -de proceso -Autómata : - puesta en funcionamiento -Plano distribución componentes del automatismo -Puesta en modo RUN -Esquema de conexionado E/S al Autómata. -Montaje -Proceso a Controlar FIN Autómatas Programables ISA-UMH © TDOC-99 9 Programación de autómatas: Introducción al Grafcet n Introducción a la programación del autómata – Definición del sistema de control n n n n n n n n n Descripciones literales Funciones algebraicas Esquemas de relés Diagramas lógicos Diagramas de flujo Grafcet Definir las variables que intervienen y asignarles direcciones de de memoria Lenguajes de programación Grafcet Autómatas Programables ISA-UMH © TDOC-99 10 5 Definición del sistema de control n n n Sistemas sin complejidad ⇒ lenguaje vulgar (descrip. Literal) Herramienta de representació representación basadas en sí símbolos(+ complejos) Clasificació Clasificación segú según los sí símbolos utilizados: – Preposicional : descripciones literales. – Algebraicas : funciones booleanas y aritméticas. – Gráfica : esquemas de contactos, diagramas lógicos o funciones lógicas, ordinogramas, técnicas GRAFCET n Descripciones literales – La descripción literal de un proceso y de su control puede hacerse hacerse enumerando literalmente las acciones a desarrollar por el mismo, expuestas secuencialmente y con indicación de las condiciones de habilitación o validación en cada caso. – Exhaustivamente o no define bien. Si se hace, difícil comprensión. comprensión. Autómatas Programables ISA-UMH © TDOC-99 11 Definición del sistema de control – Se complementa con otras formas de representación n Funciones algebraicas Y = ( BC + B C ) ⋅ A – Las funciones algebraicas de cada una de las salidas se obtienen: obtienen: n n o bien directamente de la descripción literal del proceso a controlar controlar o bien se aplican métodos de síntesis basados en el álgebra de Boole Boole (tablas de verdad, Karnaugh, etc.). – Difícil de analizar y sintetizar sistemas secuenciales. Limitado a la representación de combinaciones de variables independientes del tiempo (condiciones de alarma, operaciones aritméticas con variables variables analógicas, etc.) n Esquemas de relés – Origen: en la representaciones electromecánicas de sistemas de mando Autómatas Programables ISA-UMH © TDOC-99 12 6 Definición del sistema de control n Esquemas de relés – representación de sistemas sencillos: señales lógicas binarias t odo nada (digitales), o bloques secuenciales predefinidos, como temporizadores y contadores. – Deficiencias en cuanto a la representación de funciones secuenci ales complejas y sobre todo en la manipulación de señales digitales d e varios bits (por ejemplo, las obtenidas de una conversión A/D). – Utilizado por electricistas o ingenieros con formación eléctrica 13 Autómatas Programables ISA- U M H © T D O C - 99 Definición del sistema de control n Esquema de relés X1 Función Lógica : X2 [( X 1 ⋅ X 2 ) + ( X 4 ⋅ X 5 ) + Y 1]⋅ X 3 = Y 1 X4 Y1 X5 X3 Y1 Autómatas Programables ISA- U M H © 14 T D O C - 99 7 Definición del sistema de control n Diagramas lógicos – Este tipo de representación del sistema de control se utiliza en la documentación de las especificaciones y representación de los mismos – En muy pocos casos los usuarios finales de autómatas utilizan es ta representación 15 Autómatas Programables ISA- U M H © T D O C - 99 Definición del sistema de control n Diagramas de flujo – Organigrama y flujograma, es un sistema de representación que se basa en una serie de símbolos que según un convenio establecido tienen un determinado significado. INICIO FIN – 2 Niveles : n ACCIONES TOMA DE DECISIONES NO SI Nivel 1: – secuencia de acciones a realizar – representar el funcionamiento general del sistema n Nivel 2: – especificadas las acciones en forma de instrucción: instrucciones instrucciones entendibles directamente por el autómata o en forma de funciones lógicas. Autómatas Programables ISA-UMH © TDOC-99 16 8 Definición del sistema de control n Grafcet (Graphe (Graphe de Comande Etape Transition, cuya traducción literal es Gráfico de Orden Etapa Transición) – “es una secuencia de etapas que tienen asociadas unas determinadas determinadas acciones a realizar sobre el proceso junto con las condiciones o transiciones que provocan que se produzca el paso de una etapa a otra” – Normalizado:International Electrotechnical Commision IEC 848 – Una de las mejores herramientas para representar automatismos secuenciales Autómatas Programables ISA-UMH © TDOC-99 17 Definición del sistema de control n Grafcet 0 Etapa inicial Transición o Condición asociada Etapa 1 Acción asociada Transición o Condición asociada 2 Autómatas Programables ISA-UMH © TDOC-99 Acción asociada 18 9 Programación de autómatas: Introducción al Grafcet n n Introducción a la programación del autómata Definir las variables que intervienen y asignarles direcciones de memoria n Lenguajes de programación n Grafcet Autómatas Programables ISA-UMH © TDOC-99 19 Definir las variables que intervienen y asignarles direcciones de memoria n Definir las variables que intervienen y asignarles direcciones de de memoria – Con los métodos anteriores: n n descripción funcional del sistema de control fijadas las entradas y salidas que tendrán nombres simbólicos – Ejemplo: “Control de una puerta corredera accionada por medio de un motor. motor. El contactor S1 produce la apertura de la puerta, el contactor S2 controla controla el cierre de la puerta. El interruptor E3 de final de carrera se activa activa cuando la puerta esta abierta, y el interruptor E2 de fin de carrera se activa cuando la puerta esta cerrada...... Autómatas Programables ISA-UMH © TDOC-99 20 10 Definir las variables que intervienen y asignarles direcciones de memoria La puerta se abre al aplicar una determinada presión sobre un sensor sensor de paso de vehículos E1 situado enfrente de la puerta. Si el sensor E1 no se activa, la puerta se cierra– cierra–después de transcurridos 10 segundos. Si se activa E1, se cierra el contactor S2 y se mantiene cerrado hasta que el interruptor E3 de final de carrera desactive el contacator S2. Cuando Cuando se esta abriendo la puerta, o bien cuando una vez abierta haya detectado detectado un vehículo con el sensor E1, el temporizador T1 no se activa. Si Si no se dan estas circunstancias y la puerta esta abierta E3 activado, se se activa el temporizador T1, y transcurridos 10 segundos, la puerta se cierra cierra mediante el contactor S1 por el temporizador T1. La acción de cerrar cerrar se produce hasta que o bien se detecta fin de carrera E2 o bien se detecta otro vehículo mediante la activación de E1 en cuyo caso se abre la puerta activando para ello el contactor S2. Las lámparas LED1 y LED2 indican cuando se está cerrando o abriendo abriendo la puerta respectivamente.” Autómatas Programables ISA-UMH © TDOC-99 21 Definir las variables que intervienen y asignarles direcciones de memoria n Tabla de asignación de variables Autómatas Programables ISA-UMH © TDOC-99 22 11 Definir las variables que intervienen y asignarles direcciones de memoria n n Posteriormente se asignan las direcciones físicas a estas variables variables Además de estas variables: necesitare un contador que cuente los periodos de temporización. En las tablas anteriores este contador contador no se ha tenido en consideración. Autómatas Programables ISA-UMH © TDOC-99 23 Programación de autómatas: Introducción al Grafcet n n n Introducción a la programación del autómata Definir las variables que intervienen y asignarles direcciones de de memoria Lenguajes de programación n n n n Lista de instrucciones Diagramas de contactos y funciones Lenguajes de alto nivel Grafcet Autómatas Programables ISA-UMH © TDOC-99 24 12 Lenguajes de programación n n “Conjunto de instrucciones y/o símbolos que están disponibles para escribir el programa, se denomina lenguaje de programación” Si unidad de programación acepta directamente la representación del sist. de control, se carga en la CPU. Si no hay que traducirla traducirla al lenguaje de programación pertinente. Autómatas Programables ISA-UMH © TDOC-99 25 Lista de instrucciones n “Es un lenguaje booleano al cual se le ha añadido una serie de instrucciones que permiten la manipulación de datos y variables digitales y gestión del programa.” Y = ( BC + B C ) ⋅ A Autómatas Programables ISA-UMH © TDOC-99 LD "B” AN "C" LDN B" A "C” OLD A "A" = "Y" 26 13 Diagrama de contactos. Diagrama de funciones n n Es un lenguaje gráfico procedente del lenguaje de relés que en base símbolos que representan contactos, bloques funcionales, etc. codifican la secuencia de control. Diagrama de funciones: deriva de la representación lógica utilizada por los técnicos en electrónica digital Autómatas Programables ISA-UMH © TDOC-99 27 Lenguajes de alto nivel n n Lista de instrucciones, diagramas de contactos, ... Insuficientes Insuficientes para programar aplicaciones complejas para autómatas de gama media y alta. Herramientas de ingeniería: – S7S7-SCL: lenguaje de alto nivel que se asemeja al Pascal – M7M7-ProC/C++: Entorno Borland C/C++ y depurador multitarea. n Casi todos los fabricantes de autómatas este tipo de herramientas herramientas que permiten programar en Basic, C, Pascal, Fortran, etc. mediante el uso de los interpretes o compiladores respectivos. Estas herramientas permiten resolver tareas de cálculo científico científico de alta resolución, clasificaciones y tratamiento de datos, estadísticas, etc., con acceso a subrutinas específicas de lenguajes lenguajes informáticos. Autómatas Programables ISA-UMH © TDOC-99 28 14 Programación de autómatas: Introducción al Grafcet n n n n Introducción a la programación del autómata Definir las variables que intervienen y asignarles direcciones de de memoria Lenguajes de programación Grafcet – – – – – – – Introducción Símbolos normalizados Reglas de evolución del Grafcet Posibilidades de representación de automatismos con Grafcet Implementación del Grafcet sobre autómatas programables Niveles de Grafcet Representación de situaciones especiales en Grafcet Autómatas Programables ISA-UMH © TDOC-99 29 Grafcet Introducción n n n n El Grafcet es un método gráfico de modelado de sistemas de control secuenciales Surgió en Francia a mediados de los años 70, y fue creado por una agrupación de algunos fabricantes de autómatas, en concreto Telemecanique y Aper, Aper, junto con dos organismos oficiales, AFCET (Asociación Francesa para la Cibernética, Economía y Técnica y ADEPA (Agencia Nacional para el Desarrollo de la Producción Automatizada). Fue homologado en Francia (NFC), Alemania (DIN), y con posterioridad por la Comisión Electrotecnia Internacional ( IEC 848, 848, en 1998). Describe la evolución de un proceso que se pretende controlar, indicando las acciones que hay que realizar sobre dicho proceso y que informaciones provocan el realizar una u otra acción Autómatas Programables ISA-UMH © TDOC-99 30 15 Programación de autómatas: Introducción al Grafcet n n n n Introducción a la programación del autómata Definir las variables que intervienen y asignarles direcciones de de memoria Lenguajes de programación Grafcet – – – – – – – Introducción Símbolos normalizados Reglas de evolución del Grafcet Posibilidades de representación de automatismos con Grafcet Implementación del Grafcet sobre autómatas programables Niveles de Grafcet Representación de situaciones especiales en Grafcet Autómatas Programables ISA-UMH © TDOC-99 31 Grafcet Símbolos normalizados n Etapas – La evolución de un proceso representada mediante un gráfico Grafcet, esta formada por una sucesión de etapas que representan cada uno de sus estados, llevando cada una de ellas asociada una o varias acciones a realizar sobre el proceso. – Las etapas se representan con un cuadro y un número o símbolo con con un subíndice numérico en su interior, en ambos casos el número indica el orden que ocupa la etapa dentro del Grafcet – Las etapas iniciales, aquellas en las que se posiciona el sistema sistema al iniciarse el proceso, se representan con un cuadro doble. 1 Autómatas Programables ISA-UMH © TDOC-99 0 32 16 Grafcet Símbolos normalizados n Acción asociada – Son una o varias acciones a realizar sobre el proceso, cuando la etapa de la cual dependen dichas acciones se encuentra activada. – Dichas acciones correspondientes a una etapa, se simbolizan mediante rectángulos conectados y situados a la derecha de dicha etapa. En el interior de estos rectángulos se indica, bien de forma forma literal, bien de forma simbólica, las acciones a realizar. 1 Activar Motor Autómatas Programables ISA-UMH © TDOC-99 33 Grafcet Símbolos normalizados n En una primera clasificación se puede dividir las acciones en dos dos tipos : – Incondicionales : acciones que se ejecutan con solo quedar activadas activadas las etapas correspondientes. – Condicionales : son las acciones que necesitan el cumplimiento de de una condición además de la propia activación de la etapa correspondiente. A 1 Autómatas Programables ISA-UMH © TDOC-99 Activar Motor1 Activar Motor2 34 17 Grafcet Símbolos normalizados n Clasificar las acciones en : – Internas : acciones que se producen en el equipo de control, por ejemplo temporizaciones, contadores, cálculos matemáticos, etc. – Externas : las acciones que se producen sobre el proceso, por ejemplo abrir o cerrar una válvula, activar o desactivar una bomba, bomba, etc. n Transición y Condición de transición – En el diagrama Grafcet, un proceso se compone de una serie de etapas secuenciales que se activan una tras otra unidas mediante una transición. – El paso de una etapa a la siguiente se realiza dependiendo de si se cumple o no la condición de transición entre ellas. ellas Autómatas Programables ISA-UMH © TDOC-99 35 Grafcet Símbolos normalizados 1 Activar Motor1 Condición de transición 2 n n Desactivar Motor1 Toda transición lleva asociada una condición de transición o función lógica booleana que se denomina receptividad, receptividad, y que puede ser verdadera o falsa. Se dice que la transición está validada, cuando la etapa o etapas etapas anteriores a la transición están activadas. El franqueamiento de la transición se producirá si, y sólo si, la transición esta validada validada y la receptividad es verdadera. Autómatas Programables ISA-UMH © TDOC-99 36 18 Grafcet Símbolos normalizados n Diferentes formas de anotar la receptividad: 1 1 E1 Literal (a) 1 (b) 1 1 =1 E1 (c) (d) 1 1 E1↓ E1↑ (f) n (e) a) Descripción literal. b) Condición de transición activa. E1 E2 E3 c) Condición de transición inactiva. d) Incondicional, siempre se activa la etapa siguiente. e) Condición de transición en forma de función lógica de varias variables. f) Condición de transición de flanco descendente, la señal pasa de 1 a 0. g) Condición de transición de flanco ascendente, la señal pasa de 0 a 1. (g) Arco – Es el segmento de recta que una transición (con su condición de transición) con una etapa y viceversa, pero nunca dos elemento iguales entre sí. Los arcos pueden ser o verticales u horizontales, horizontales, además los arcos verticales deben llevar una flecha indicando su sentido en el caso de ser este ascendente Autómatas Programables ISA-UMH © TDOC-99 37 Grafcet Símbolos normalizados n Esquema de elementos que componen el Grafcet Etapa Arco ascendete Arco Marca Acción 0• Activar Motor1 1 Desactivar Motor1 La situación de etapa activada, se indica mediante la colocación de una marca en el interior del gráfico representativo de la etapa etapa Transición n Líneas paralelas (concurrencia ) Autómatas Programables ISA-UMH © TDOC-99 1 2 3 4 38 19 Programación de autómatas: Introducción al Grafcet n n n n Introducción a la programación del autómata Definir las variables que intervienen y asignarles direcciones de de memoria Lenguajes de programación Grafcet – – – – – – – Introducción Símbolos normalizados Reglas de evolución del Grafcet Posibilidades de representación de automatismos con Grafcet Implementación del Grafcet sobre autómatas programables Niveles de Grafcet Representación de situaciones especiales en Grafcet Autómatas Programables ISA-UMH © TDOC-99 39 Grafcet Reglas de evolución del Grafcet n Reglas – La etapa inicial de un Grafcet se activan de forma incondicional. incondicional. Esta situación inicial se corresponde en general con una situación de reposo. – Una transición esta en disposición de ser validada cuando todas las etapas inmediatamente precedentes, unidas a dicha transición, están están activadas. La activación de una transición se produce cuando está está validada y la condición de transición o receptividad es verdadera. verdadera. Se podría definir una etapa como activable cuando la transición precedente esta validada. Autómatas Programables ISA-UMH © TDOC-99 40 20 Grafcet Reglas de evolución del Grafcet n Reglas – Franquear una transición implica la activación de todas las etapas etapas siguientes inmediatas, y la desactivación de las inmediatas precedentes. – Transiciones conectadas en paralelo, se activan de forma simultánea simultánea si se cumplen las condiciones para ello. – Una o varias acciones se asocian a cada etapa. Estas acciones sólo sólo están activas cuando la etapa esta activa. Autómatas Programables ISA-UMH © TDOC-99 41 Programación de autómatas: Introducción al Grafcet Grafcet n Grafcet – – – – Introducción Símbolos normalizados Reglas de evolución del Grafcet Posibilidades de representación de automatismos con Grafcet n n n – – – Estructuras base Estructuras lógicas Ejemplo Implementación del Grafcet sobre autómatas programables Niveles de Grafcet Representación de situaciones especiales en Grafcet Autómatas Programables ISA-UMH © TDOC-99 42 21 Grafcet Estructuras base n Grafcet soporta diferentes tipos de estructura secuencial: – Estructura base: trata conceptos de secuencialidad y concurrencia concurrencia – Estructura lógica: trata conceptos de concatenación de estructuras estructuras n Estructuras base – Estructuras de secuencia única n Son estructuras formadas por secuencias de etapas que se van activando activando una tras otra, sin interacción con ninguna otra estructura – Estructuras de secuencia paralela n Son un conjunto de estructuras únicas activadas por una misma transición de forma simultanea. Después de la activación de las distintas secuencias su evolución se produce de forma independiente Autómatas Programables ISA-UMH © TDOC-99 43 Grafcet Estructuras base 11 21 31 ...... 1 12 22 32 2 . . . . . . . . . . . . Estructura de secuencia única xx yy 11 xx yy yy Autómatas Programables ISA-UMH © TDOC-99 Estructura de secuencias paralelas 44 22 Programación de autómatas: Introducción al Grafcet Grafcet n Grafcet – – – – Introducción Símbolos normalizados Reglas de evolución del Grafcet Posibilidades de representación de automatismos con Grafcet Estructuras base Estructuras lógicas Ejemplo n n n – Implementación del Grafcet sobre autómatas programables – Niveles de Grafcet – Representación de situaciones especiales en Grafcet Autómatas Programables ISA-UMH © TDOC-99 45 Grafcet Estructuras lógicas n n Funciones lógicas OR, AND y saltos condicionales Divergencia OR – Se utiliza cuando lo que se trata es de modelar la posibilidad de de tomar dos o más secuencias alternativas a partir de una etapa común. n1 x n Autómatas Programables ISA-UMH © TDOC-99 y La etapa n pasará a estar activa si estando activa la etapa n1, n1, se satisface la condición de transición o receptividad x. De igual forma la etapa n2 pasará a estar activa si estando activa la etapa n1 se satisface la condición de transición o receptividad y. n2 46 23 Grafcet Estructuras lógicas n Convergencia OR n la etapa n1 pasará a estar activa, si estando activa la etapa n se satisface la condición de transición o receptividad x; o si estando activa la etapa n2 se satisface la condición de transición o receptividad y. n2 x y n1 n Divergencia AND – Permite la implementación de procesos concurrentes síncronos, de forma que dos o más subprocesos del sistema, representados por las las secuencias paralelas, pueden activarse de forma sincronizada. Autómatas Programables ISA-UMH © TDOC-99 47 Grafcet Estructuras lógicas n Grafcet. Divergencia en AND n1 La etapa n2 y n pasarán al estado activo, si estando activa la etapa n1 se satisface la condición de transición o receptividad d+c d+c n n n2 Convergencia en AND n n2 La etapa n1 pasará a estar activa, si estando las etapas n-1 y n-2 activas se satisface la condición de transición o receptividad x x n1 Autómatas Programables ISA-UMH © TDOC-99 48 24 Grafcet Estructuras lógicas n Saltos Condicionales i x i x i+1 y . . . . i+1 y . . . . i+j z (a) se implementa un salto condicional a la etapa i+j+1 si esta activada la etapa i y se cumple la condición de transición o receptividad (b) se implementa un bucle que permite la repetición de la secuencia secuencia de etapas hasta que x sea igual a 1. i+j z i+j+1 u i+j+1 u (a) (b) Autómatas Programables ISA-UMH © TDOC-99 49 Programación de autómatas: Introducción al Grafcet Grafcet n Grafcet – – – – Introducción Símbolos normalizados Reglas de evolución del Grafcet Posibilidades de representación de automatismos con Grafcet n n n – – – Estructuras base Estructuras lógicas Ejemplo Implementación del Grafcet sobre autómatas programables Niveles de Grafcet Representación de situaciones especiales en Grafcet Autómatas Programables ISA-UMH © TDOC-99 50 25 Grafcet Ejemplo n El siguiente ejemplo, dos montacargas se mueva cuando se pulsa un botón (x1 o x2) en sentido ascendente hasta el final de recorrido (s,t), y de inmediato se descendiende a la situación inicial (q,r). s D1 t U1 D2 X1 U2 X2 q r Autómatas Programables ISA-UMH © TDOC-99 51 Grafcet Ejemplo n Primer supuesto: – La pulsación de x1 o x2 deberá iniciar el movimiento ascendente del montacargas m1 o m2 respectivamente. Sólo un montacargas debe estar en funcionamiento a la vez. También inicialmente se supone que el accionamiento simultáneo de los dos pulsadores no puede ocurrir. 0 X1 ⋅ q X2 ⋅ r U1 1 t s 2 D1 q Autómatas Programables ISA-UMH © TDOC-99 U2 3 4 D2 r 52 26 Grafcet Ejemplo n Variación: se requiere un sólo pulsador X para iniciar el movimiento de los dos montacargas, sincronismo en el inicio del movimiento y la única restricción que se impone es que para cada ciclo de funcionamiento ambos montacargas deben estar situados en su posición incial (q y r). Además se deja abierta la posibilidad posibilidad de que los dos montacargas posean movimientos con distintas s t velocidades. D1 U1 D2 U2 X q r Autómatas Programables ISA-UMH © TDOC-99 53 Grafcet Ejemplo n Ejemplo con un solo pulsador n Con acciones condicionales 5 0 X⋅q⋅r U1 1 0 s X⋅q⋅r 1 U1 s 2 U2 3 q t D1 4 t D1 2 q U2 3 D2 4 r r D2 q⋅r Autómatas Programables ISA-UMH © TDOC-99 54 27 Grafcet Ejemplo n Si en el ejemplo anterior se pretende que exista también sincronismo en el moviento de descenso del montacargas, para ello el sistema debe esperar a que ambos montacargas se encuentren en la posición (s, t) antes de iniciar el movimiento de descenso simultáneo hasta la situación inicial (q, r). 0 s t X⋅q⋅r 1 U1 U2 q s⋅t r 2 D1 D2 q⋅r Autómatas Programables ISA-UMH © TDOC-99 55 Grafcet Ejemplo 0 U1 1 U2 5 s t 2 6 1 D1 3 q r 4 Autómatas Programables ISA-UMH © TDOC-99 D2 7 8 1 56 28 Programación de autómatas: Introducción al Grafcet Grafcet n Grafcet – – – – – – – Introducción Símbolos normalizados Reglas de evolución del Grafcet Posibilidades de representación de automatismos con Grafcet Implementación del Grafcet sobre autómatas programables Niveles de Grafcet Representación de situaciones especiales en Grafcet Autómatas Programables ISA-UMH © TDOC-99 57 Grafcet Implementación del Grafcet sobre A.P.I n n n Diagrama Grafcet que representa el proceso ⇒ en un algoritmo de control y su posterior programación sobre un API. Para ello a cada una de las etapas en las que se divide el Grafcet Grafcet se le asocia una variable interna. La condición de transición es la encarga de activar la etapa siguiente y desactivar la anterior; para ello se utilizan las instrucciones Set y Reset que poseen todos los autómatas programables. Autómatas Programables ISA-UMH © TDOC-99 58 29 Grafcet Implementación del Grafcet sobre A.P.I n En el Siemens S7S7-200 las instrucciones SET y RESET son: n n Cuando se ejecutan las operaciones “Set” (Poner a 1 (S)) y “Reset” (Poner a 0 (R)), se activa (se pone a 1) o se desactiva (se pone a 0) el número indicado de salidas (N) a partir del valor indicado por el bit o por el parámetro OUT.El margen de E/S que se pueden poner a 0 está comprendido entre 1 y 255. Las instrucciones Set y Reset se utilizan para activar o desactivar las variables internas que en este autómata son las marcas internas (M0.0, M0.1,...., etc.). Autómatas Programables ISA-UMH © TDOC-99 59 Grafcet Implementación del Grafcet sobre A.P.I 0 . . . a Activa la etapa “y” y desactivar la etapa “x” x b y Activa la etapa “z” y desactivar la etapa “y” c z d Autómatas Programables ISA-UMH © TDOC-99 60 30 Grafcet Implementación del Grafcet sobre A.P.I n Para activar la etapa inicial “0” existen diferentes formas : – Como última línea del programa de control del autómata, se pone a cero “Reset” de la marca asignada a la última etapa, siempre que la condición de transición se cumpla. Además añadimos una línea más donde se active la marca correspondiente a la etapa inicial siempre siempre que todas las etapas anteriores estén desactivadas. .... Autómatas Programables ISA-UMH © TDOC-99 61 Grafcet Implementación del Grafcet sobre A.P.I – Otra posibilidad es que cuando se cumpla la última condición de transición se desactive la última etapa activa y se active la etapa etapa inicial. – Existe otra posibilidad de activación de la etapa inicial, que se se realiza mediante el uso de variables internas del sistema. Esta última opción opción depende del tipo de autómata utilizado. Autómatas Programables ISA-UMH © TDOC-99 62 31 Grafcet Implementación del Grafcet sobre A.P.I n Varios ejemplos de cómo codificar en lenguajes de contactos algunos casos que se pueden dar en diagramas Grafcet – Divergencia OR n1 x x n n2 Autómatas Programables ISA-UMH © TDOC-99 63 Grafcet Implementación del Grafcet sobre A.P.I – caso de secuencias paralelas 10 a 11 12 13 14 . . . . . . . . 21 22 23 24 b Autómatas Programables ISA-UMH © TDOC-99 25 64 32 Grafcet Implementación del Grafcet sobre A.P.I – Saltos condicionales a otras etapas 1 x 11 2 y (a) x . . . . 12 y 8 z . . . . 25 (b) z 9 u 26 u (a) (b) Autómatas Programables ISA-UMH © TDOC-99 65 Grafcet Implementación del Grafcet sobre A.P.I n Mediante funciones lógicas en un diagrama de escalera – La ecuació ecuación de activació activación o desactivació desactivación asociada a la etapa ené enésima : En = En −1 ⋅ Tn −1 + En +1 ⋅ En "La etapa En se activará activará, si estando activada la etapa En-1 y desactivada la En+1 se satisface la transició transición Tn-1. Apartir de este instante permanecerá permanecerá activada hasta que se active la En+1" – Aparte se tiene que afrontar las ecuaciones de activació activación de las acciones asociadas a las etapas. etapas. La expresió expresión de estas ecuaciones dependerá dependerá del cará carácter condicional o incondicional de estas acciones. Autómatas Programables ISA-UMH © TDOC-99 66 33 Grafcet Implementación del Grafcet sobre A.P.I Etapa nú número 5 Etapa nú número 3 0 . . . Ta E3 A1 A1 = E3 A5 = E5 E4 = E3 ⋅ Tb + E4 E5 A2 A3 A4 Tc E5 E5 = E 4 ⋅ Tc + E5 E6 Etapa nú número 4 Tb E4 E3 = E 2 ⋅ Ta + E3 E 4 x A5 A6 Td A6 = x ⋅ E5 A2 = E 4 A3 = E 4 A4 = E 4 Autómatas Programables ISA-UMH © TDOC-99 67 Grafcet Implementación del Grafcet sobre A.P.I n n Si Grafcet ª estructuras ló lógicas, saltos, etc ª Fun. Log. +Complejas Partiendo de Ecuac. Ecuac. General: En t + ∆t = Cond A + Cond D ⋅ En ( ) – CondA: CondA: condició condición de activació activación – CondD, condició condición de manteniemiento y desactivació desactivación n DIVERGENCIA OR (t ) i Cond D = (E1 + E 2 + ..... + Ei ) = ∑ E n n =1 E0 x1 E1 MORGAN xi x2 E2 Ei i Cond D = ∏ E n n =1 i E 0 (t + ∆t ) = Cond A + ∏ E n ⋅ E 0 (t ) n =1 Autómatas Programables ISA-UMH © TDOC-99 68 34 Grafcet Implementación del Grafcet sobre A.P.I n CONVERGENCIA OR i E1 E2 x1 Cond A = ( E1 ⋅ x1 + E 2 ⋅ x 2 + .... + E j ⋅ xi ) = ∑ E n ⋅ x n Ei n =1 xi x2 i E0 E0 (t + ∆t ) = ∑ En ⋅ xn + Cond D ⋅ E0 (t ) n =1 n DIVERGENCIA AND E0 i Cond D = ∏ E n n =1 x i E 0 (t + ∆t ) = Cond A + ∏ E n ⋅ E 0 (t ) E2 ......... En E1 n =1 Autómatas Programables ISA-UMH © TDOC-99 69 Grafcet Implementación del Grafcet sobre A.P.I n CONVERGENCIA AND E1 E2 ........ En . x i Cond A = ∏ E n ⋅ x n =1 E0 i E 0 (t + ∆t ) = ∏ E n ⋅ x + Cond D ⋅ E0 (t ) n =1 Autómatas Programables ISA-UMH © TDOC-99 70 35 Grafcet Implementación del Grafcet sobre A.P.I n Etapas iniciales – La etapa/as inicial/es deben quedar activadas cuando se inicializa el sistema. – las etapas iniciales no tienen ninguna etapa ni transición precedente que puedan incluirse en las condiciones de activación (CondA (CondA)) de la expresión general. – Para solucionar este problema se introducen unas condiciones de activación iniciales CondAI, CondAI, adicionales a las condiciones de activación CondA. CondA. – Este tipo de etapas se implementan, mediante la siguiente expresión: E 0 (t ) = Cond AI + Cond A Autómatas Programables ISA-UMH © TDOC-99 71 Grafcet Implementación del Grafcet sobre A.P.I n La expresió expresión de las condiciones de activació activación iniciales se puede obtener de dos formas: – Aprovechando el hecho de que, en la fase de inicializació inicialización del programa las variables está están inicializadas a cero y por tanto, tambié también todas las variables internas representativas de las diversas etapas etapas existentes estará estarán inicializadas a cero. Cond AI = i i ∏ n =1 En E 0 (t ) = ∏ E n + Cond A n =1 Esta expresió expresión puede llegar a ser laboriosa de implementar, si el Grafcet que se está está realizando dispone de un gran nú número de etapas. Autómatas Programables ISA-UMH © TDOC-99 72 36 Grafcet Implementación del Grafcet sobre A.P.I – Otra posibilidad, aparece por el hecho de que los autó autómatas programables disponen de una serie de marcas del sistema o marcas marcas especiales. Existe una de ellas que está está activa durante el primer ciclo de programa y desactiva en los restantes. Cond AI = SM E0 (t + ∆t ) = SM + Cond D ⋅ E0 (t ) + Cond A Autómatas Programables ISA-UMH © TDOC-99 73 Grafcet Implementación del Grafcet sobre A.P.I Ejemplo de implementar las etapas iniciales : 0 X1 X2 1 3 X3 a) E 0 (t ) = E1 ⋅ E 2 ⋅ E3 ⋅ E 4 + E 2 ⋅ X 5 + E 4 ⋅ X 6 X4 2 4 X5 b) X6 E 0 (t + ∆t ) = SM + (E1 + E3 ) ⋅ E 0 (t ) + E 2 ⋅ X 5 + E 4 ⋅ X 6 ( ó ) E0 (t + ∆t ) = SM + E1 ⋅ E3 ⋅ E0 (t ) + E2 ⋅ X 5 + E4 ⋅ X 6 Autómatas Programables ISA-UMH © TDOC-99 74 37 Programación de autómatas: Introducción al Grafcet Grafcet n Grafcet – – – – – – – Introducción Símbolos normalizados Reglas de evolución del Grafcet Posibilidades de representación de automatismos con Grafcet Implementación del Grafcet sobre autómatas programables Niveles de Grafcet Representación de situaciones especiales en Grafcet Autómatas Programables ISA-UMH © TDOC-99 75 Grafcet Niveles de Grafcet n A la hora de representar mediante un grafcet el sistema de control es conveniente estructurarlo dos niveles : – Nivel 1 : En este nivel se representa solamente el funcionamiento lógico del sistema en una terminología próxima al lenguaje corriente, corriente, se realiza independientemente de las decisiones que a posteriori se tomen en cuanto a la tecnología a utilizar, a la nomenclatura y tipo de variables seleccionadas, etc – Nivel 2 : En este nivel se tienen en cuenta las decisiones tecnológicas tomadas, la nomenclatura y tipo de variables, etc. y se hace referencia a ellas en el diagrama grafcet de este nivel Autómatas Programables ISA-UMH © TDOC-99 76 38 Grafcet Niveles de Grafcet n Ejemplo: Sistema de control de una máquina taladradora M BR BL SR X Y Z C P A B Autómatas Programables ISA-UMH © TDOC-99 77 Grafcet Niveles de Grafcet n Funcionamiento de la taladradora: n n n existe un pulsador “B”, “B”, de inicialización del sistema, con objeto de que el motor adquiera una velocidad de giro de régimen permanente, que se obtiene accionando M. El taladro posee varias velocidades en el sentido longitudinal del eje, léase bajada lenta del utensilio del taladro taladro BL, BL, bajada rápida BR y subida rápida SR. SR. La pieza en la que se va a realizar el taladro se detecta mediante mediante un detector inductivo P, y se sujeta mediante dos sujeciones accionadas por C. La tarea de realizar un taladro sigue la siguiente secuencia: primero se detecta la pieza mediante el detector inductivo, posteriormente posteriormente se pulsa el botón “A” de inicio de operación con lo que actúan las sujeciones de la pieza y al mismo tiempo se inicia el descenso rápido rápido de la broca “BR”. “BR”. Antes de empezar a realizar el taladro propiamente dicho a la pieza, pieza, el detector “Y” provoca el paso de descenso rápido de la broca a descenso lento “BL”, “BL”, el cual se interrumpe cuando se detecta el final de carrera “Z”. “Z”. Inmediatamente se produce la subida rápida de la broca hasta alcanzar la posición de reposo “X”. “X”. Autómatas Programables ISA-UMH © TDOC-99 78 39 Grafcet Niveles de Grafcet n Grafcet Nivel 1 0 Pulsador de inicialización Motor de giro reg. permanente 1 Inicio de operación y detectada pieza 2 Apresar pieza y descenso rápido broca Fin de descenso rápido 3 Descenso lento Final de carrera descendente 4 Ascenso rápido de la broca Final de carrera ascendente Autómatas Programables ISA-UMH © TDOC-99 79 Grafcet Niveles de Grafcet n Grafcet Nivel 2 0 0 M 1 A⋅p M C BR 2 M C BL 3 M C SR X (a) Pr. monoestable Autómatas Programables ISA-UMH © TDOC-99 BR - BL+ Z Z 4 C+ BR+ Y Y 3 M+ 1 A⋅p 2 M - SR - C B B 4 BL - SR+ X (b) Pr. biestable 80 40 Programación de autómatas: Introducción al Grafcet Grafcet n Grafcet – – – – – – – Introducción Símbolos normalizados Reglas de evolución del Grafcet Posibilidades de representación de automatismos con Grafcet Implementación del Grafcet sobre autómatas programables Niveles de Grafcet Representación de situaciones especiales en Grafcet Autómatas Programables ISA-UMH © TDOC-99 81 Grafcet Representación de situaciones especiales en Grafcet n Secuencias exclusivas 9 a b 10 n a b 11 Temporizadores y contadores – Función temporización en Grafcet se implementa a través del operador de temporización t / n / temp El valor de la temporización en seg, min u hor. Etapa a la cual esta referida la temporización. Indica la operación de temporización. Autómatas Programables ISA-UMH © TDOC-99 82 41 Grafcet Representación de situaciones especiales en Grafcet n Clasificación de las temporizaciones: – Temporización con retardo: retardo: Cada dispositivo de temporización tiene asociada una variable que en este tipo de temporización permanece permanece en estado bajo “0”, mientras que se efectúa la operación de temporización. temp Variable de temporización Etapa n Autómatas Programables ISA-UMH © TDOC-99 83 Grafcet Representación de situaciones especiales en Grafcet – Temporización al arranque: arranque: Cada dispositivo de temporización tiene asociada una variable que en este tipo de temporización permanece permanece en estado lógico alto “1”, desde el mismo comienzo de la temporización, pasando a estado lógico bajo “0” cuando ha transcurrido la temporización establecida. Su funcionamiento es el mismo que la temporización con retardo si la variable asociada al al temporizador es complementada, por lo tanto este tipo de temporización se denota complementando la notación que representa la temporización con retardo. temp Variable de temporización Etapa n Autómatas Programables ISA-UMH © TDOC-99 84 42 Grafcet Representación de situaciones especiales en Grafcet n Incorporación de las temporizaciones al Grafcet: – Temporización de acciones: acciones: Es el caso en el cual se pretende temporizar la ejecución de la acción asociada a una etapa, de forma forma que no se ejecute la acción hasta que transcurra un cierto instante instante de tiempo. temp Variable de temporización t / n / temp Trn-1 n Etapa n A Trn Acción A Trn Autómatas Programables ISA-UMH © TDOC-99 85 Grafcet Representación de situaciones especiales en Grafcet – Temporización de la transición de una etapa: etapa: Es el caso en el cual la receptividad asociada a una transición depende de que la variable variable de temporización sea activada. Si se trata de una temporización con retardo esta transición no será superada hasta que transcurra un cierto instante de tiempo. temp Variable de temporización Trn-1 n B Etapa n t / n / temp Acción A Autómatas Programables ISA-UMH © TDOC-99 86 43 Grafcet Representación de situaciones especiales en Grafcet n Contadores – Hay tres tipos, los que realizan la operación cuenta de forma ascendente, descendente o ambas a la vez. Trn-1 n Trn Autómatas Programables ISA-UMH © TDOC-99 Trn-1 B = B+1 n B = B-1 Trn 87 44