T592.pdf
Anuncio

ESCUELA POLITÉCNICA NACIONAL
FACULTAD DE INGENIERÍA ELÉCTRICA
"SIMULACIÓN DE MÉTODOS DE SATURACIÓN PARA EL ANÁLISIS DE LA MAQUINA
•-SINCRÓNICA"
TESIS PREVIA A LA OBTENCIÓN DEL TITULO DE
INGENIERO ELÉCTRICO EN LA ESPECIALIZACION
DE POTENCIA
GALO ALBERTO ANDINO RACINES
ABRIL-1984
Certifico que la presenta tesis
ha sido realizada, en su
tota1J_
dad por el Sr. GALO ALBERTO
DIÑO RACINES.
r-OfW^rANTA 0.
DIRECTOR DE TESIS
AN_
AGRADECIMIENTO:
Mis sinceros agradecimientos al I n g .
Mil ton Toapanta 0. por el asesoramiej]_
to brindado para la elaboración
la presente Tesis.
de
ÍNDICE
Pag,
CAPITULO
I
: INTRODUCCIÓN
•
1.1.
Generalidades —
1.2.
Objetivos y alcance de la tesis
CAPITULO
—
1
2
II : LA MAQUINA SINCRÓNICA
.
2.1.
Ecuaciones de la máquina sincrónica
2.2.
Ecuaciones de la máquina--en términos de.las variables
de estado
•
-
•
11
2.3.
Representación del sistema mecánico
2.4.
Efecto de saturación en el comportamiento de la máqui-
_
na
2.5.
--—_
:
^ 15
Métodos de simulación de la no lineal i dad'del hierro •-
17
—
20"
Ecuaciones de.la máquina sincrónica incluida la satura_
don —
•
. 30
——
CAPITULO III : DESARROLLO DEL PROGRAMA DIGITAL
.
3.1.
Ecuaciones para .la simulación digital
r
3.2.
Descripción del programa principal
3.2.1. Características
3.3.
14
—
2.5.1. Cálculo de los factores de saturación——-—
2.6.
5
Descripción de las subrutinas'—.
;
-
.
33
35
—•
35
.
37
Pag,
3.3,1.
CAPITULO
Diagramas de bloques
•--
42
IV : ANÁLISIS DE RESULTADOS
4.1.
Resultados délos modelos -
4.2.
Comparación de resultados
CAPITULO
-•
V
: CONCLUSIONES Y RECOMENDACIONES
b „ j..
conclusiones
5.2.
Recomendaciones
APÉNDICE A:
~:
~
/o
——
—•-
MÍNIMOS CUADRADOS .
•
——
86
87
APÉNDICE B: MANUAL DE USO DEL PROGRAMA DIGITAL
o.i
D
i. .
TI n
i HI U
n
1 -Lf -U
R ,9
U
c. .
nhio-Hvn
UUJ C U I VU
B.3.
Método —
B.4.
Descripción del programa
B.5.
Nomenclatura —
—
-
:-
..- _
'.-
- . — — _ — —
_
Q
V
3 ^j
_
'._
-
_
—
_
_
T
Q^í
-j j
93
-- —
93
•
103
B.5.1. Variables de entrada
—
B.5.2. Variables de salida - —
103
—
B.6.
Características
—
B.7.
Forma de proporcionar los. datos
B.8.
Restricciones
108
109
———
109
110
NOMENCLATURA
SIMBOLOGIA
'
.
.
'
, .
-
Los símbolos de las ecuaciones desarrolladas en los capítulos posten'^
res, tienen las siguientes definiciones:
rs
: 'resistencia de armadura,
X-|s
: reactancia de dispersión del devanado de armadura,
rkq
X]^q
:
resistencia del devanado amortiguador en el eje en cuadratura
:• reactancia de dispersión del devanado amortiguador en el
eje
en cuadratura.
': resistencia del devanado amortiguador del eje directo,
X]kd
: reactancia de dispersión del devanado amortiguador en el eje;
directo.
r.^
: resistencia del devanado de campo..
X-jfj
: reactancia de dispersión del devanado de campo.
Xaq
: reactancia dé magnetización del eje en cuadratura.
Xacj
: reactancia.de magnetización del eje directo.
concatenación de flujo por segundo del eje en cuadratura.
concatenación de flujo por segundo del eje directo,
f
concatenación dé flujo por segundo del devanado amortiguador
del eje en cuadratura.
concatenación de flujo por segundo del devanado amortiguador
del eje directo,
concatenación de flujo por segundo del devanado de campo.
concatenación de flujo ^mutuo por segundo en el eje en
cua-
dratura.
concatenación de flu.io mutuo oor segundo en el eje directo.
p
kd
kq
A
: operador
:
factor de saturación del eje directo.
: factor de saturación del eje en cuadratura,
C A P I T U L O
I
INTRODUCCIÓN
1.1.
GENERALIDADES
Los Sistemas Eléctricos de Potencia se han incrementado en cuanto a su
tamaño y complejidad debido al crecimiento .de la demanda; por tanto, el
deseo de predecir v entender el adecuado funcionamiento del Sistema tam
bien se ha incrementado.
De los muchos elementos que conforman un Sistema Eléctrico de Potencia,,
una de las partes fundamentales es l a ' M á a u i n a Sincrónica aue es la
en_
caraada de transformar en forma exclusiva la energía mecánica en energía eléctrica, actuando la máquina en este caso como generador; anotándose además que ésta también puede ser usada como motor, siendo las dos
formas de usarse de mucho valor dentro del campo de la Ingeniería
trica.
Elé£
Por lo tanto siendo asi, es i n d i s p e n s a b l e desarrollar técnicas
que permitan investigar el comportamiento de la máquina sincrónica y por
consiguiente de un Sistema Eléctrico de Potencia.
Una manera de
conse
q u i r l o y que se ha puesto muy común en la actualidad es la s i m u l a c i ó n de los diferentes elementos de un Sistema de Potencia y en este caso pa_r
t i c u l a r la s i m u l a c i ó n de la M á q u i n a Sincrónica para su desarrollo
por
medio de conputadores, para lo cual se r e q u i e r e . d e modelos matemáticos,
haciendo notar q u e , los modelos deben estar d i r i g i d o s a que los
fenóme_
nos transitorios l l e g u e n a ser entendidos lo más claramente p o s i b l e
además que los c á l c u l o s sean razonablemente interpretados.
y
1.2. OBJETIVOS Y ALCANCE DE LA TESIS
Existen varios modelos para describir el comportamiento de una máquina sincrónica, diferenciándose en complejidad y exactitud, la mayoría
de
éstos están basados en la. teoría de los dos ejes.
Varios trabajos se han realizado como Tesis de Grado en la Facultad y
en uno de ellos se ha planteado la modelación del efecto no lineal del
hierro conocido también con el nombre de .Saturación, que en definitiva
constituye un aporte hacia el análisis de la máquina sincrónica;
sin
embargo de ello, existen otros modelos para simular éste efecto
los
cuales pueden ser analizados y ver cual de ellos es el más recomendado
o a su vez bajo que condiciones se adaptan para simular una condición'
especial del comportamiento de la máquina.
En consecuencia el presente trabajo pretende simular éstos modelos ma_
temáticos que representan la saturación y resolver el sistema de ecuaciones en el computador digital.
:
*
Se contrastan los resultados de los diferentes modelos entre sí y
ade_
más con. los resultados de la Tesis de Grado del Ingeniero Jesús Játiva"Modelo Digital de Máquinas Sincrónicas incluida la Saturación"; anali
zándose las ventajas y desventajas que presentan uno frente a otro.
Los diferentes modelos matemáticos están basados en el cálculo de los
factores de saturación, los mismos que en unos casos son calculados una
vez al comenzar el proceso iterativo de resolución de las ecuaciones diferenciales del modelo de la máquina sincrónica, mientras que en otros
casos son calculados en cada paso durante el proceso- de solución. Estos factores modelan la no linealidad del hierro y son usados para mp_
dificar las ecuaciones que representan a la Maquina Sincrónica.
y
Es necesario el manifestar que ha sido práctica común el utilizar
la
curva de magnetización (o característica de vacío), para cumplir
con
éste propósito la curva de circuito abierto-que se utiliza aquí corres_
ponde a la característica de vacío en el eje directo; sin embargo
de
ello, también existe otra característica de vacío que corresponde
al
eje en cuadratura, la misma que presenta su relativa importancia en la
modelación moderna de máquinas sincrónicas principalmente para el
ana
lisis de estabilidad de Sistemas Eléctricos de Potencia.
La característica en vacío del eje en cuadratura, no fue posible
el
obtener en nuestro laboratorio por cuanto éste presenta sus limitacio
nes, lo que redundaría en perjuicio del presente trabajo.
vio tomando la información" de la Referencia
Esto se al i
1 para éste asunto
en.
particular; es decir-t^se tomó la curva de magnetización cjue representa^^y
para el eje directo de la Tesis__de Grado del Ingeniero Jesús J.átiva yy
tomando ésta como referencia así como la información del artículo "Com
parative Study of Saturation methods in synchronous machine models" y
con ciertas aproximaciones se obtuvo la característica de vacío
del
eje en cuadratura, comolementandose de ésta manera la modelación de la
saturación; objeto.de ésta tesis.
El modelo básico imolementado en el presente trabajo es el que utiliza
\o variab
El programa digital está diseñado para realizar varias contingencias que pueden producirse en la máquina sincrónica, actuando ésta corno
mo_
tor o como generador; pero con fines de mostras la validez de los
re_
sultados.se
fásico-.
tomará únicamente el relacionado con el cortocircuito trj_
C A P I T U L O
I I
LA MAQUINA SINCRÓNICA
2.1. ECU^K)NE^EUA^
,j-
Las ecuaciones de la máquina sincrónica'son las que rigen a una
máqui_
na que tiene tres devanados en el estator, un devanado de'campo, y dos
devanados amortiguadores, estando estos seis devanados magnéticamente
acoplados.
El acoplamiento magnético entre estos devanados es función
de la posición del rotor y por tanto las concatenaciones de flujo
cada devanado son también una función de la posición del rotor.
de
La re_
presentación de ésta máquina puede observarse'en la figura 2.1.1.
En cada uno de los devanados de la figura 2.1.1. se puede aplicar
la
ecuación de voltaje que escrita matricialmente es de la siguiente
fo_r
ma:
[v] = [r].[i] + p[X]
donde:
.
[v] : matriz de voltaje -de cada devanado.
[r] : matriz de resistencia de cada devanado,
[i] :;matriz de corriente de cada devanado.
[X] : matriz de concatenaciones de flujo,
p
: operador •• ..
(2.1)
•-
EJE b
EJE q
-EJE a
EJE c
EJE d
Flg. 2.1.1. Máquina sincrónica de polos salientes
Por lo tanto, escribiendo las matrices completas de la ecuación (Z.l.)s
se tend.rá:
.
" 0
'
'•
Vas
rs
0
0
Vbs
0
rs
0
0
0
Ves
0
0
rs
0
0
.
0 . ' 0-
ias
^as
0
ibs
^bs
0'
ics
+ p
=
Vkq
0
Vkd
Vfd
.
Acs
0
0 .
rkq
0*
0
ikq
X kq
0
0
0
0
rkd
0'
íkd
xkd
0
0
0
0
0
ffd
ifd
x fd
-
(2.2)
La ecuación que rige a las concatenaciones de flujo de los devanados tiene la siguiente forma:
[A] = [L] [T]
•
(2.3)
donde:
>] =
Ec.
Aas
i as
^bs
ibs
^cs
íes
[i] =
e -
^kq
">kq
x kd
""kd
^fd
ifo1
(2.4)
Ec,
t-asas
L asbs
Lascs
Lbsas
^bsbs
^-bscs
Lesas
Lcsbs
LCSCS
L askq
(2.5)
L askd
Lasfd
\-bskq
Lbskd
Lbsfd
Lcskq
Lcskd
Lcsfd
(2-6)
[L] L kqas
L kqbs
Lkqcs
L kqkq
L kqkd
Lkqfd
Lkdas
L kdbs
Lkdcs
L kdkq
. L kdkd
Lkdfd
Lfdas
Lfdbs
Lfdcs
Lfdkq
Lfdkd
Lfdfd
La potencia instantánea viene dada por:
=
Vas ias
i'bs + vcs "¡es
(2.7)
El torque se obtiene de dividir la potencia electromagnética por la ve
locidad del rotor.
.
• .-
Las ecuaciones de la máquina sincrónica dadas anteriormente (variables
a, b, c), resultan complicadas de manejar.
Ventajosamente,"éstas
pue
den simplificarse grandemente por medio de una adecuada transformación
de variables, la cual es conocida como "Transformaci-ón de Park" ,
la
cual define un nuevo conjunto de variables del estator tales como
co-
rrientes, voltajes o concatenaciones de flujo, en términos de las
ac-
tuales variables de los devanados, definiéndose un nuevo grupo de ejes,
que rotan a la velocidad angular eléctrica del rotor.
Puesto que. la referencia se mueve a "la misma velocidad del rotor, las
variables del rotor no sufren cambio alguno, y puesto que se mira el
comportamiento en los ejes q y d, se puede considerar que la transformación se hace de un sistema trifásico a un sistema bifásico. Las variables del eje cero no están asociadas con la transformación y
exis-
ten en la misma referencia en que se producen. 2
Las concatenaciones de flujo en los nuevos ejes se rigen por la sigirien_
te ecuación matricial:
o
o
'qs
"
Lad
L-
i'ds
'
O
O
os
O
Llkq+Laq O
O
ikq
Lad
O
O
Lad
o
O
O
Laq
O •
O
Lis
0
O
Xkd
Xfd
aq
.
Llkd+Lad L£
ikd
Lad
if.d
(2.8)
Los voltajes tomando en cuenta el signo para acción'motora vienen dados
por las siguientes ecuaciones matriciales:
- Para el estator:
9
V qs
Vds
=
Vos
0
0
Aqs
0
Ads
o
^os
p8r
rs
0
0
iqs
0
rs
0
ids + -p6r 0
0
0
rs
ios
o
o
Aqs
+p
Ads
AOS
(2.9)
- Para el rotor:
Vkq
Vkd
=
^kq
0
°
ikq
0
r kd
0
ikd
0
rfc|
ifd
0
Vfd
.
*kq
+ P
^kd
(2.10)
Afd
La potencia Instantánea viene dada por:
iqs
+ v ds
ids
+ v os
(2.11)
ios
El torque electromagnético viene definido por:
' '' 3
qs
(2.12)
n"ds)
De las ecuaciones m a t r i c i a l e s ( 2 . 9 ) y (2.10), se obtiene las siguientes
ecuaciones:
qs
= rs
i'qs
"qs
+ L aq("¡qs
ids + L a d ( i d s
Vos
=
v kq =
^s i o s
+
l^kq "¡kq
(2.13)
P( L ls - i o s )
. i' kq
ifd)3
'10
vfd = rfd
Del grupo de ecuaciones (2.13), se puede definir los circuitos equivalentes para cada uno de los ejes, teniendo por tanto:
Para el eje q:
. J*g
-V—;
-*-«-
-f\ +
lkq
AdsP0r
qs
Fig. 2.1.2.
Para el eje d:
'ds
Fig. 2.1.3.
r kq
11
Para el eje o:
'os
A-
os
Fig. 2.1.4.
2.2. ECUACIONES DE LA MAQUINA EN TÉRMINOS DE LAS VARIABLES DE ESTADO.-
Las ecuaciones de la máquina sincrónica expuestas anteriormente pueden
ser escritas en función de las concatenaciones de flujo por segundo cp_
mo variables de estado; resultando éstas de multiplicar las concatena_
cienes de flujo por la velocidad angular eléctrica.
Igualmente hacie_n_
do las transformaciones respectivas se consigue plantear las
ecuacio-
nes en valores en por unidad (p.u.) 2 .
x ls
iq + Xaq(iq
Yi
n , -I- Y
A ls
'd
, (i ,
A ad^'d
(2.15)
x lkq
^kq + xaq("
x lkd
"¡kd + xad("
12
= xlfd
Vd + xad(id + ^'kd + ifd)
Usando la relación dada por la ecuación (2.14), además la ecuación de
la velocidad angular p6r = ü>r y, reemplazando los voltajes de los dev¿
nados de amortiguamiento por cero ya que se encuentran cortocircuita dos, se tendrá las ecuaciones de Tos voltajes:
Vq =
0
= rk
0 =
^+ ~ * k
•
(2-16)
" -kd
vf = rfd
Puesto que se va a usar las concatenaciones de flujo por segundo como
variables de estado, se resuelve las ecuaciones (2.15) para corrientes
y se reemplaza en las ecuaciones (2.16), obteniendo el sistema de ecua_
ciones diferenciales no lineales de primer orden el- cual puede
expre-
sarse de la siguiente formar
{[Vqdf].+ [Xm] M)
Donde:
'
.
(2.17)
13
rS
\
/y
r s Xmq
Wr
-'
WL
b
tu
-
Y-it
xlsVMlld
r kq x mq
'
U
X lkq X ls
n
r kq
, Xmq
Y -ir
WTI
x lkq x lkq
' r kd xmd
x lkd x ls
0
Q
rf d
Xnid
x lfH x ls
0
^s
xls
J
n
Q
0
U
A ls A lkq
r x A i^
.
'
n
YT
Tx
^
Xlkd
^s md
Xls Xlfd
n
"1J
•
n
°
0
rkd ,xmd ^ r k d xmd
X ] k d X-¡ kd
X - j ^ d X-jfd
• rf d Xmd
XI-FH XIL-H .
rf d X md
Xi-F.rXi.Pj
-1)
y las matrices [>], y [Vqdf] son:
y;
O
O'
.Vf
Además, en la matriz [Xm]s Xmq y Xmd están dadas por
' 1
aq
x md
"
x ls
Xad
X lkd
Otro modelo alternativo es el que usa las corrientes como variables .de
estado, es decir, X = (iq, i d > i[<qs 1kd> ifd)¡ Pero ^s"t:e modelo tiene
14
la desventaja de tener que invertir la matriz de inductancias en cada
paso dentro del proceso de solución, por tanto para la simulación di
gital, como ya se anotó anteriormente, se empleará el modelo que
usa
las concatenaciones de flujo como variables de estado.
Puesto que las corrientes son de mucha utilidad en el presente anál_i_
sis, se considera a la máquina conectada a un sistema trifásico
sinté
trico, es decir se tiene i 0 = 0; por tanto, para las corrientes
res_
tantes se .tendrá:
(2.18)
Xl:
Donde la matriz [X-f] viene definida por:
- 1)
Xmq
Xlkq
Xmd
x lkd
_
Xlfd
Teniendo i q e i<j5 las corrientes de fase pueden ser fácilmente obtenó_
das mediante la utilización de la transformación inversa, por tanto:
a
=
eos 0r + "¡d
sen 9r.
(2.19)
2.3. REPRESENTACIÓN DEL SISTEMA MECÁNICO.-
El sistema mecánico está representado por la velocidad angular del rp_
tor y por el torque electromagnético, los cuales- vienen definidos de
la siguiente forma:
.
15
(Te - Tm)
(2.20)
y
en donde:
.
Te : Torque electromagnético.
Tm : Torque de la máquina impulsora en p.u,
H
: Constante de inercia en segundos.
El ángulo de potencia está definido de la siguiente :forma:'
. .pS = wb (ur - we)
(2.22)
en donde:
toe : Velocidad angular eléctrica en p.u..
wb ': Velocidad angular eléctrica base.
wr : Velocidad angular del rotor.
'2.4.
EFECTO DE LA SATURACIÓN EN EL COMPORTAMIENTO. DE LA MAQUINA. -
Los valores de las inductancias, presentes en las anteriores ecuacio nes dependen de las condiciones magnéticas de la máquina, así como
de
la saturación- en el hierro y los efectos deb'ido a las corrientes
de
Eddy, especialmente en rotores sólidos; el presente traba jo -no incluye
los efectos de la corriente de Eddy y solamente toma en cuenta el ferio
meno de la saturación.
16
El efecto de la saturación influye en el comportamiento de la máquina,
ya que determina el voltaje de- campo para lograr un voltaje terminal
preestablecido y además es importante cuando se utiliza sistemas
de
excitación ya que influye directamente en el funcionamiento del siste_
ma de excitación 13 .
Es necesario considerar el efecto de la saturación en las máquinas si_n_
crónicas para determinar exactamente las características de estabil_i_
dad de estado estable y poder hacer una comparación de estas
caracte_
rísticas dentro de motores y generadores ya que la saturación del cvr
cuito magnético de la.máquina sincrónica materialmente afecta los H
mi tes de estabilidad de estado estable y determina los límites
tencia; en el caso de no incluir el efecto de la saturación
de D£
la exa£
titud será menor en el análisis de estabilidad de los sistemas
8 .
Los principales datos del circuito magnético relacionados con la satu_
ración se desprenden de la curva de circuito abierto, en la que se ti_e
ne una. relación entre el voltaje de armadura y la corriente de excita_
ción; en ésta curva si no estaría presente la saturación, se
una relación lineal; lo cual sucede inicialmente
tendría
(en ésta parte no
tiene ninguna influencia la saturación); pero, a partir de un
cierto
punto (llamado "codo"), 1.a curva de circuito abierto se separa
de la
característica lineal; por consiguiente, la separación de las
curvas
es un indicador del nivel de saturación existente.
Como se desprende de lo anterior, mientras el punto al cual opera
la
máquina esté en la parte lineal o cercano al "codo 11 , la saturación notiene mucha influencia; pero, si el punto de operación está
alejado
17
del "codo", la saturación ya presenta su .Influencia en el comportamien_
to de la máquina.
Métodos anteriormente desarrollados para el estudio de las
máquinas
sincrónicas bajo condiciones saturadas, introducen valores de reactaji_
cias "ajustados", "equivalentes" o "saturadas" para simular el efecto
de la saturación en el comportamiento de la máquina. '
2.5. MÉTODOS DE SIMULACIÓN DE LA NO LINEALIDAD DEL HIERRO.-
La máquina sincrónica viene representada por siete ecuaciones diferejv
ciales no lineales de primer orden, lo que hace que la solución sólo
pueda ser obtenida mediante el uso de un computador analógico, o
por
el método de integración paso por paso en un computador digital.
La representación del efecto de la saturación ha conducido al desarro
lio de varios métodos, algunos de los cuales se describen a
continua^
ción.
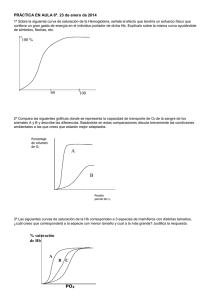
Un método muy conocido de incluir los efectos de la saturación en el
eje directo es mediante el cálculo del factor de saturación como
fim
ción del voltaje tras una reactancia, entonces se añade una componente de campo (Alf) debido al incremento de la corriente de campo. Este
incremento de la corriente Alf es calculado en la curva de circuito _a_
bierto como se ve en la figura (2.5.a.).
Un método que encuentra limitada aplicación es el que asume que la sa_
turación es una función del voltaje tras la reactancia de dispersión
•
18
AIf(p.u.)
_ _
* ab
Fig. 2.5.a. Curva de circuito abierto.
de armadura, entonces .calcula la f.e.m. del entrehierro correspondiente a éste voltaje y añade la reacción de armadura para obtener la co
rriente de campo, éste método se utiliza solamente para generadores de
rotor cilindrico, también está basado en la curva de circuito
abierto
como se ve en la figura (2.5.b.).
v(p.u.)
be
= ac
Fig. 2.5.b. Curva de circuito abierto
Un método más complejo es el que usa el cálculo del voltaje
tras la
reactancia de dispersión de armadura y la reactancia subtransitoria -.
19
.y usa el voltaje y la curva de saturación de circuito abierto para
de-
terminar el factor de saturación, el cual se utiliza para modificar las
reactancias
mutuas
en los dos ejes, ésto se ve en la figura (2.5.C.).
v4
Kc =
ab
be
If
Fig. 2.5.C. Curva de circuito abierto
En el presente trabajo se va a- usar el modelo que emplea los factores de
saturación, los cuales son utilizados en las ecuaciones de la
máquina
sincrónica; éstos factores serán calculados de diferente manera dando asf
origen a los varios modelos que serán implementados (10 modelos).
Una posibilidad es resolver la distribución completa del campo magnético
dentro de la máquina, durante cada paso de la solución paso por paso; co_
mo puede verse, éste método podría resultar lento y si se habla en térmj_
nos computacionales, más caro; un método más sensilTo y rápido será aquel
que asume sólo ciertas inductancias en la saturación del circuito equiva_
lente, siguiendo ésta aproximación luego se asume que las
inductancias
de dispersión del rotor y del estator tienen valores constantes, ésto irn
plica que. solamente las trayectorias de flujo mutuo entán sujetas a la
saturación, afectando, de esta manera a tj^mcj y if^q o en otras palabras
a
20
La mayoría de los métodos que utilizan para el cálculo los valores satu_
rados de L a d y Laq están basados en la curva de saturación de circuito
abierto (o.c.c.) como referencia para encontrar los factores de satura_
ción Kd y Kq, los cuales entonces son utilizados de la siguiente man£
-
ra:
Lad '= «d - kdu-
kq
=
Kq . L a q u -
(2.23)
.
(2.24)
donde L a du y LaqU son los valores no saturados de Lad y Laq respectiva
mente.
1
Puesto que una inductancia está definida por: X/co, y considerando
que
la velocidad angular permanece constante se puede escribir que:
Xad = 'Kd . X adu
Xaq = Kq . X aqu
-
(2.25)-
(-2.26)
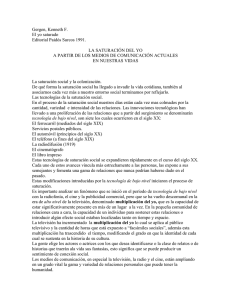
2.5.1. Cálculo de los factores de saturación
La curva de circuito abierto para el eje d, que se muestra en la figura
(2.5.1.) es una relación entre la f.m.m. Fd y la concatenación de flujo
mutuo Xmd en éste eje. • .
Del grupo de ecuaciones (2.15), se puede definir concatenaciones de flu_
jo mutuo tanto .del eje directo como del eje en cuadratura, en las que -
21
Amd
B
F i g . 2.5.1. Característica de circuito abierto del eje directo.
se tiene la inductancia de magnetización del eje d y del eje q respecti_
vamente, m u l t i p l i c a d a s por las corrientes que c i r c u l a n por e l l a s ,
por
tanto:
=
Lad(id
(2.27)
ifd)
(2.28)
Amq
De la figura (2.5.1.) se tiene que el valor de L ac ] u es proporcional
a
la pendiente de la parte de la recta OE de la curva de circuito abierto,
por
tanto:
-
"
Ladu
•
(2.29)
22
Por otro lado, Lac¡ es proporcional a la pendiente de la linea recta OC,
cuando X mc j = OB S por tanto:
DC
OD
Lad =
(2.30)
De las ecuaciones ( 2 . 2 9 ) y ( 2 , 3 0 ) , despejando OD e i g u a l a n d o , - s e tiene
DE
L adu
y como
DC
—^L a ( j = L a du -
DC
DE
L ac j = Kd . L a c ju» se tiene que:
DC
DE
AB
BC
(2.31)
Definiéndose de esta manera el factor de saturación del eje directo; en
forma similar se puede llegar a definir el factor de saturación del eje_
en cuadratura Kq, a partir de la respectiva curva de circuito abierto pa_
ra éte eje, como se ve en la figura (2.5.2.).
Fig. 2.5,2. Característica de circuito abierto del eje en cuadratura,
23
El cual vendrá d e f i n i d o por:
pR
Los valores de los factores de saturación pueden ser obtenidos experimentalmente mediante la construcción de las curvas de circuito abierto
y luego aplicando las ecuaciones (2.31) y (2.32) a varios puntos de és_
tos, pudiéndose de esta manera llegar a tener curvas que muestran
la
variación de los factores de saturación.
Para propósitos del presente trabajo, la Referencia
2 , proporciona -
la curva de vacío en la que se representa el voltaje de armadura versus la corriente de excitación e indica el proceso que se debe
seguir
para obtener la curva Ea = f(ifd); siguiendo éste procedimiento se ha
obtenido ésta curva, la cual se presenta en el Apéndice A, Trabajando
sobre ésta y aplicando la Ecuación (2.31) a varios puntos de la misma,
se puede obtener la variación de K^ como función de iíimc}s ésta curva es_
tá representada en la figura (2.5.3.).
En vista de no contar con la curva de vacío para el eje en cuadratura,
se va a usar la curva en que se representa la variación de Kq como fun_
ción de ijjmq que proporiona la referencia
11 , la cual también se
re-
De estás curvas y aplicando la técnica denominada "Curva Adecuada
por
presenta en la Figura (2.5.3.).
Mínimos Cuadrados" (ver Apéndice A), se ha podido obtener las siguientes expresiones algebraicas para K^ y K .
._.._ . .
___
/
/
L,L_.LJ.^LJL /..../. / /../.
FACTORES .DE ': SATURACIÓN EN
LAS ; CONCATENACIONES . DE F
•-v-t-rL^t--^L
"
' T - - - - - • ] • • • •/..-./-^Z-.X""^,-^—
••;•
¡j • • • • •]• •.-,-•••^r—¿'
f-« ?!•
T ; t ¡:'.'; r::.;;'!;,'.;:';; i ~ . i ¡:
25
k d = 1.034 - 0.35(JJ m d ) + 1.174(>f n l d) 2 -
'
(2-33)
k q = 1.0112 - 0.2342(i|i m q ) + 1.0603(i|) mq ) z
Algunos modelos pueden utilizar las concatenaciones de flujo totales
como indicador del nivel de saturación, el cual está definido como:
(2-34)
Con todo lo anteriormente anotado se puede definir los diferentes
mode_
los que serán impl ementados.
MODELO 1 : Este modelo hace las siguientes consideraciones:
a. No considera la saturación del eje en cuadratura, es de
i
cir solo introduce la saturación para el eje directo.
b. Utiliza las concatenaciones de flujo totales t¡rj- obtenido mediante la-Ec. (2.34) como indicador del nivel de s_a_
turación para encontrar el factor de saturación del
eje
directo kd.
c. Este proceso de calculo sólo se realiza una vez antes de
una falla.
Por tanto éste modelo es uno de los más sencillos; por las
consideraciones antes anotadas no es tan exacto ya que
uti_
liza ipy calculado de la ecuación (2.34) en la ecuación (2.33)
asumiendo que la concatenación de flujo total se extiende a
26
lo largo
MODELO
del eje directo.
2 : Este modelo hace las mismas consideraciones "a" y "b" del mo
délo anterior; pero, el calculo del factor de saturación Kd
es repetido en cada uno de los pasos del proceso de
ción de las^ecuaciones diferenciales, es decir los
soluvalores
se van actualizando.
MODELO 3 : Este modelo hace las siguientes consideraciones:
a. No toma en cuenta la saturación del eje en cuadratura, so_
lo introduce la saturación en el eje directo.
b. Utiliza en forma más correcta las concatenaciones de flu_
jo mutuo del eje directo (^mci) en la ecuación (2.33)
pa_
ra encontrar el factor de saturación K^.
c. Este proceso de cálculo sólo se realiza una vez antes de
una falla.
Por lo tanto éste modelo es más corrector que los dos
ante_
riores.
MODELO
4 : Este modelo toma las mismas consideraciones "a" y "b" . del
modelo anterior, pero el cálculo es repetido en cada uno de
los pasos del proceso de solución de las ecuacj£]iej^diferen_
cíales.
27
MODELO
5 : Este modelo toma en cuenta las siguientes consideraciones:
a. Introduce la saturación-tanto para el eje directo
como
para el eje en cuadratura.
b. Utiliza las concatenaciones de flujo totales ifjy calculado de la ecuación (2,34) como'indicador del nivel de
turación para encontrar el valor del factor de
sa_
satura-
ción K(j en la ecuación (2.33).
c. Considera el mismo valor del factor de saturación
para
los dos ejes, es decir asume que Kq = Ktf.
d. El calculo se realiza una vez antes de una falla.
Este modelo, si bien introduce la saturación para el eje en
cuadratura, tiene el inconveniente que utiliza el mismo. v_a_
lor del factor de saturación para los dos ejes (Kq = K<j); po_
dría ser conveniente en los casos en que no se pueda contar
con datos del eje en cuadratura.
MODELO 6 : Este modelo toma en cuenta las consideraciones "a", "b"
y
"c" del modelo anterior, pero el calculo es repetido en
ca_
da uno de los pasos durante el proceso de solución
de
las
ecuaciones diferenciales.
MODELO
7 : Este modelo hace las siguientes consideraciones:
. a. Introduce la saturación tanto para el eje directo
como
28
para el eje en cuadratura.
b. Utiliza las concatenaciones de flujo mutuo if^d y ijjmq
en
las ecuaciones (2.33) para encontrar los factores de
sa_
turaclón Kd y Kq respectivamente.
c. El cálculo se realiza una sola vez antes de una falla.
Este modelo por tanto, es el más correcto en cuanto a que
considera la saturación en los dos ejes y además ya que uti_
liza las concatenaciones de flujo mutuo de cada eje en las
ecuaciones (2.33) para encontrar los factores de saturación
de cada eje respectivamente.
MODELO
8 :.Este modelo hace las mismas consideraciones "a11 y "b"
del
modelo anterior; pero, el cálculo es repetido en cada
uno
de los pasos del proceso de solución de las ecuaciones -dife_
renciales.
MODELO
9 : Este modelo toma en cuenta las siguientes consideraciones:
a. Introduce la saturación tanto para el eje directo
como
para el eje en cuadratura.
b. Utiliza las concatenaciones de flujo totales ^y calculado, de la ecuación (2.34) como indicador del nivel de sa_
turacióri para encontrar los factores de saturación de ca
da uno de los ejes.
29
c. El cálculo se realiza una vez antes de una falla.
Este modelo no es exacto ya que usa las concatenaciones
de
flujo totales \¡)j (que es un valor mas grande que'ijjmc| y ipmq)
en las ecuaciones (2.33) para encontrar los factores de sa_
turación de cada uno de los ejes (K^ y Kq).
MODELO 10 : Este modelo hace las mismas consideraciones "a" y "b"
del
modelo anterior; pero, los factores de saturación son actua_
lizados en cada paso de la solución de las ecuaciones
dife^
réndales.
Todos éstos diez modelos pueden ser clasificados en dos grandes grupos:
a. Modelos para representar la saturación en el eje directo; y
b. Modelos para representar la saturación en los dos ejes.'-
Por tanto, dentro del primer grupo estarían los modelos numerados: 1, 2
3 y 4; mientras que dentro del segundo grupo estarían los modelos
res_
tantes, 'ésto es los números: 5, 6, 7, 8, 9 y 10.
En la siguiente tabla se presentan los diez modelos que han sido
rrollados en el presente trabajo, los mismos que serán i mpl ementados en
el programa digital y cuyos resultados se analizarán, en el Capitulo IV.
30
TABLA No. 1
MODELO
SATURA
N°
XadóXaq
MODELOS ÍMPLEMENTADOS
INDICADOR
DEL
FACTOR
NIVEL DE SATURA.
Xad
rT
2
x ad
*T
3
Xad
^md
4
Xad
^md
xad
^T
Xaq
rT
Nd
Y
ih -T-
V .
6
7
8
9
10
x ad
^T
'
'
'
PASO POR PASO
^d
UNA VEZ
^d
PASO
Kd
^d
Kd
xad
*md
Kd
X'
Q.U
il) m^
IIIM
K^
Xad
^md
^d
Xaq
^mq
^q
V
TÍ1
X
lÍJ-r
A aq
' ^T
xad
*T
Y
ih
xaq
^T
UNA VEZ
Kd
*T
^T"
CALCULO
• ^d
Xaq
xad
MÉTODO DE
SATURACIÓN
1
5
DE
POR
UNA VEZ
PASO
.
.
PASO
POR
PASO
UNA VEZ
>4
PASO
POR
PASO
V
Kd
•UNA VEZ
K^
q
Kd
PASO
POR PASO
k'
Rq
2.6. ECUACIONES DE LA MAQUINA SINCRÓNICA INCLUIDA LA SATURACIÓN
La ecuación matricial básica es la dada por la ecuación (2.17), la
no
lineal idad del "hierro es introducida por medio del cálculo de los fact£
res de saturación K^ y K q , calculados como se indica en el punto
ante_
rior, luego utilizando las ecuaciones (2.25) y (2.26), se altera los va_
lores de Xacj y X a q y por ende los valores de Xmq y Xmcj los mismos
que
31
tienen directa participación en l a ecuación ( 2 . 1 7 ) ; por tanto:
a. A p a r t i r de los- valores de ijjmd y i^q obtenidos de las condiciones I n i c i a l e s , se c a l c u l a n los factores de saturación Kd y Kq según
el
modelo deseado, a p l i c a n d o las ecuaciones (2.33).
b. Calculados estos valores se modifican las reactancias mutuas,
ésto
es:
x ad = Kd
• x adu
aq
aqu
c. Con estos valores modificados de X ad y X a q se calcula la matriz [X m ]
la misma que Interviene en la ecuación matrlclal básica (2.17) que •
es:
.
P*
tübí
=
Vqdf I +
Xm
^[}
Donde:
rS(v
X ] S V mcl
wr
^s f v
tub
Y 1
x ml
-
co r
ub
r kq Xmq
r s xmq
X l s X-| kq
, -M r kq
Q
/ -Xmq
x lkq
x lkd
Q
^s
r fd
X]kq
Xi s
xmd
Xif d Xi s
Xrtlc^
x ls x lkd
•r
Xlkq X]S
,
n
x ls /X|Tld
Q
"
^
^ s rod
x ls x lfd
.
°
°
.
Xi k d X ] k d
Xi k d Xif d
:. .
ird'.X md
Xifd Xi k d
rf d ^ X md ^
X]fd'Xifd
32
En esta matriz Xmq y Xmc( tienen la siguiente forma:
X ls
x aq
X lkq
+
'l'q
y
V qdfl
=
o
o
Vf
. •
•C A P I T U L O
33
III
DESARROLLO DEL' PROGRAMA DIGITAL
3.1. ECUACIONES PARA LS SIMULACIÓN DIGITAL.- '
Del capítulo II se tienen las siguientes ecuaciones matriciales que se_
ran implementadas.
(3.1)
qdf
Donde:
l
^
r s ,Xm1-1
'
XlsXl
xm
r kq
cor
r s Xmq
WK
D
Y
Y
A ls A lkq
rs, x nid
A ls W-i
AI S
tür
~®b~
YT
xmq
0
x ls x lkq
r kd
0
-\ 4
Xmd
n
5
r s xmd
xls Y
x]kd
n
'
V~~^(Y ^ -1)
r fd
y
A md
°
r kd
0
X ls x lkd
0
rs- X md
x l sV VX l f d
Y
Xlkq xlkq
/ Xmd
y»
Y
r f d Amd
x ls x lfd
L
3
°
x lkd v X][<d
Q
t
0
U
^ i"kd xmd
X l k d X]f d
•
X lfd x lkd
Y
* rfd ^ A md
Xlfd^fd
4
., ^
"
V i
n
1*1 = ll
y ;
.
ivqdfl -
0
^kd
0
*fd
Vf
-
34
Además en la matriz
Xm se tiene que Xmq "y Xmcj están dadas por:
x mq
y
x ls
x ad
Xlkd
X]fd
Para la recuperación de las corrientes se tiene la seguiente ecuación
ma trie i al:
Donde
A mg
vrr
xlkq
^md
x lkd
Todas estas ecuaciones han sido u t i l i z a d a s en la elaboración del programa digital .
En este capítulo se presenta por tanto, el desarrollo del programa digital en detalle,, el cual ha sido Implementado en l e n g u a j e FORTRAN I V ,
probado y grabado en el Computador IBM 370-125 de la Escuela Politécnj_
ca N a c i o n a l .
35
El presente programa digital consta de un programa principal y de seis
subprogramas, los cuales se. mencionan a continuación:
- Subrutina VAYCOD
- Subrutina CONINI
- Subrutina COEFFI
.
.
- Subrutina SATURA
-. Función
RUNGE
- Subrutina PLOT
3.2. DESCRIPCIÓN DEL PROGRAMA PRINCIPAL
A continuación se describen las principales características del progra_
ma:
3.2.1. Características
Título
: "SIMULACIÓN DE MÉTODOS -DE SATURACIÓN PARA EL ANÁLISIS
DE LA MAQUINA SINCRÓNICA"
Lenguaje
: FORTRAN IV
Probado y
bado en
: Computador IBM 370-125 de la Escuela Politécnica Nacional.
Capacidad
: El programa está implementado para realizar cuatro
con_
tingencias; en cada uno de los cuales se puede sacar un
36
listado de resultados ó listado y gráficos de los resulta^
dos de acuerdo al Indicador que se da como dato. Los
di-
menslonamlentos pueden ser aumentados, teniendo en cuenta
el límite que permite el computador en cuanto a memoria.
El programa consta básicamente de las siguientes partes:
A.
Lectura de Datos:
- Se leen los datos de: velocidad angular eléctrica base,
voltaje
terminal fase-neutro, factor de potencia, potencia aparente monof|_
sica, Indicador para escoger el tipo de funcionamiento, tiempo máxj_
mo de observación del fenómeno, paso de Integración de las ecuado_
nes diferenciales, Indicador para producir las perturbaciones, va_
lor de las funciones escalón, tiempo de Inicio de la perturbación
e Indicadores para escoger los. modelos.
• '•
- Se leen datos de: resistencias y reactancias de la máquina sincrónica, constante de Inercia de la máquina y la velocidad
angular
eléctrica rotórica Inicial.
- Se leen los datos de: factores de multiplicación de*la corriente de fase, corriente en los ejes q y d, de la corriente de excitación
de las concatenaciones de-flujo en los ejes q y d, de la
desvia-
ción rotórica, del ángulo de potencia y del torque electromagnético; así como también los datos para el valor de la escala superior
para los gráficos que se desean
obtener.
37
B. Se comprueba la validez de los datos mediante el us.o d é l a Subrutina "VAYCOD".
C. Se calculan las condiciones iniciales de operación de la máquina me
diante el uso de la Subrutina "CONINI".
D. Los valores obtenidos de las condiciones iniciales son asignados
a
los vectores -V(I')J = 1.7 y CIA(I), I = 1.5; se asignan valores
a
las matrices de graficación.
E. Se evalúan las derivadas .por el método "Runge-Kutta" de cuarto
or-
den para lo cual se usa el SUbprograma "FUNCTION RÜNGE", desarrolla^
do en la Referencia 2.
F. Se introduce el efecto de la saturación para lo cual se utiliza la
Subrutina "SATURA".
G. Se calculan los coeficientes de las ecuaciones diferenciales
utili-
zando la Subrutina "COEFI".
H. Se simulan los disturbios y'se obtienen los resultados ya sea en for.
ma de listado o en forma gráfica usando la Subrutina. "PLOT" desarrp_
liada en la Referencia 2.
3.3. DESCRIPCIÓN DE LAS SUBRUTIMAS
El programa digital consta de un programa principal y de seis
subpro
gramas, los cuales se detallan a continuación y se describen en el or
33
den establecido en el programa principal.
SUBRUTINA VAYCOD
:
Verifica si todos los datos han sido proporcionados al programa de una manera correcta. En ca_
so de error en los datos, se detiene la
ejecu_
clon del programa y da el respectivo mensaje de
error a más de indicar el numero total
de erro,
res.
SUBRUTINA CONINI
Esta subrutina es la encargada de calcular las
condiciones iniciales de la máquina sincrónica,
condiciones éstas que siempre son requeridas en
todo estudio dinámico que se pretenda realizar.
SUBRUTINA COEFI
Esta subrutina es la encargada de calcular los
coeficientes de las ecuaciones diferenciales que
van a ser implementadas en el programa según la •
ecuación (3.1) siendo definidos estos coeficien_
tes como sigue:
' s
p (0
/
A mq
X ls
X Ts
-- .D
r S Xrnq
P(a)
P(s)
D , .i
X ls X l k q
rs
x ls
rs
/
x md
x ls
^md
x ls x lkd
-D
39
P
F(5)
-
r s xmd
- x l s x lfd
-" r kq
' (7}
v
/
~ v
x lkq
r kd
lkq
W-» •
X lkq
~ •*•/
x md
Is A lkd
x md
lkd
rkd
y
x lkd
X md
lfd
r kd xmd
X l s Xlfd
md
lkd
p(13)
-
x lfd
Para la recuperación de las corriente
los siguientes coeficientes;
Xmc
ls
(15)
mg
" X ls X lkq
X md
ls
tenemos
40
,
_
(17) " - X ls X]kd
(ie)
SUBRUTINA SATURA
!s Xlfd
Esta subrutina es la encargada de realizar
el
cálculo de los factores de saturación de los
di_
ferentes' modelos impl ementados, estos factores de saturación son los que afectarán a Xacj y Xaq
y por tanto a Xm(j y Xmq valores éstos que ínter
vienen en los coeficientes de las ecuaciones
dj_
ferenciales lográndose de esta manera introducir
la no lineal i dad del hierro, para el caso del mo_
délo no saturado, a los valores de los factores
de saturación se les asigna el valor de 1.0.
FUNCIÓN RUNGE
Esta función emplea el método Runge Kutta de Cuar_
to Orden con coef i cíentele Kutta para
integrar
un sistema de N ecuaciones diferenciales ordin_a_
rios simultáneas de Primer Orden f(j)~dy(j)/dx ,
(j=l,23..., n), a través de un paso de
integra_
ción H en la variable independiente X, sujeta a
condiciones iniciales y(j), (¿=1,2,...,n), cada
f(j), la derivada y(j), debe ser calculada
cua_
tro veces por paso de integración, por el progra_
ma principal.
La función debe ser llamada cinco
veces por paso, de tal manera que el valor de la
variable independiente X y los valores de la
so_
lución y(l), y(2),.,.5 y(n) pueden ser actualiza
dos mediante el método Runge-Kutta. Runge reto_r
na con valor 1 para señalar que todas las der1v_a
das (f(j)) sean evaluadas o O para señalar
que
el proceso de integración para el paso de ese mo^
mentó ha terminado. SAVEY (j) se usa para guardar el valor inicial de y(j) y PHl(j) es el incremento de la función para la ecuación j-ésima,
Como se encuentra escrita la función, N no puede
ser mayor que 50.
SUBRUTINA PLOT
.•
: Esta subrutina presenta los resultados en forma
gráfica; a cada uno de los gráficos acompaña
un
listado del comportamiento de la variable en el
tiempo.
Los resultados a ser graficados de manera que
dan ser convenientemente apreciados, deben
^
ser
modificados por factores de multiplicación y
es_
calonamiento, los cuales son leídos como
datos
en el programa principal. Se transfiere
además
el índice KDC que determina el número de
punto
a imprimirse. ICOUNT es el contador de pasos ,
cuando se iguala a los pasos de integración
IFREQ, se tiene un nuevo punto para el gráfico.
3.3.1. Diagramas de bloques
A continuación se presenta un diagrama de bloques^ el cual permite
sualizar en mejor forma los pasos seguidos en el programa principal
la interconexión existente entre todos sus componentes.
•
viy
§
Ui
*-
-&•
1
LÜ
U)
0
(V
5^
0
to
o
§
cy
§
N
o;
? ^
^
0
•§K
44
C A P I T U L O
IV
ANÁLISIS DE RESULTADOS
4.1. RESULTADOS DE LOS MODELOS.-
Se debe anotar que debido a la cantidad de resultados que proporciona el programa, solamente se presentarán y compararán los resultados
cortocircuito trifásico: , aunque también se obtuvo los
del
resultados
de
los diferentes modelos funcionando en estado estable para comprobar su
correcto funcionamiento en el cual las condiciones Iniciales calculadas
de los datos Impuestos, tomados de la Referencia
2 , deben
mantenerse
constantes durante todo el proceso de Integración de las ecuaciones
di_
ferenclales.
Para el caso del cortocircuito trifásico se asumió que el generador es_
taba conectado a una barra I n f i n i t a , funcionando en estado estable y que
en un determinado tiempo repentinamente se produce el cortocircuito trj_
fásico a los terminales de la m á q u i n a ; en el programa d i g i t a l , ésto
se
puede simular haciendo que el voltaje de linea tome el valor de cero, és_
to es que V a = O + J O ; además, se debe dar como dato el ángulo
cual se I n i c i a el cortotlrculto.
t
6 r al
Los datos de tiempo y el á n g u l o son:
= 0.02 seg.
6 r - 90°
De la Tabla 1 de los modelos implementados presentado en el capítulo -
45
U, se puede notar que:
.
.
Algunos modelos sólo Introducen la,saturación para el eje directo,
utl^
lizando ^7 (modelos 1 y 2) o \jj m( j (modelos 3 y 4), para encontrar el • v_a_
lor del factor de saturación K^ en la ecuación ( 2 . 3 3 ) ; los modelos 1 y
2 Introducen un cierto error ya que usan el valor de í(jj c a l c u l a d o de la
ecuación ( 2 . 3 4 ) siendo éste un v a l o r un poco más alto que el
v a l o r de
ip mc i;-;en cambio los modelos 3 y 4 en forma más correcta usan el valor de
'ip mc l para encontrar el- factor de saturación K^.
Los demás modelos (5, 6,. 7 a 8, 9 y 10) Introducen la saturación p á r a l o s
dos ejes: los modelos 5 y 6 toman el mismo valor del factor de saturaclon, es decir asumen que Kq = K,J; los modelos 7 y 8 u t i l i z a n los
res de ^mci y ijjmq para encontrar los valores de los factores
valc>_
de satur^
clon K(j y Kq respectivamente; mientras que los modelos 9 y 10 usan
i(jj
como Indicador del nivel de saturación en las ecuaciones (2.33) para e_n_
contrar los valores de los factores de saturación Kj y Kq.
Las condiciones I n i c i a l e s de la máquina sincrónica se encuentran med1an_
te el programa d i g i t a l , el mismo que puede proporcionar para cada
uno
de los modelos implementados los resultados de corriente: en el eje
cuadratura 3 en el eje directo, de excitación, de fase;
en
concatenaciones
de f l u j o : en el eje en cuadratura, en el eje directo; á n g u l o - d e
poten-
cia ; desviación de la velocidad rotórica y torque electromagnético, va_
riando con el tiempo; éstos resultados se presentan a continuación
en
las figuras 4.1.1. a 4.1.9.
Los resultados-del modelo tomado de la Referencia
2 se presentan
en
la Figura 4.1.10.
Todos estos resultados son objeto de análisis y comparación en el
guiente punto de éste Capitulo.
si-
4.2. COMPARACIÓN DE RESULTADOS,-
La.comparación de resultados se realiza entre todos los modelos implementados y además se los compara con los resultados obtenidos mediante
el programa "implementado'en la Tesis de Grado del Ingeniero Jesús Ját1_
va.
.
-
Se debe anotar que el tiempo de computación que utiliza cada uno délos
modelos en la solución del programa digital también ha sido tomado
en
cuenta como elemento para el análisis de los resultados.
Para una mejor comparación y análisis de los resultados se han elabora_
do gráficos en los cuales se presentan las curvas de los diez modelos
Implementados y además el modelo tomado de la Tesis de Referencia
2
para cada una de las variables; además-, se ha elaborado la Tabla 2 en
la cual se tienen los valores de los picos (máximos y mínimos)
y
el
tiempo al cual se producen los mismos.
De los resultados obtenidos,'de los gráficos que se muestran en las F1_
guras 4.2.1. a 4.2.8. se puede observar que si bien todos los modelos
presentan las mismas formas de ondas y sus picos se producen.prácticamente a un mismo tiempo, se presentan diferencias producto de las asun_
clones que cada uno de los modelos hace, así:
El modelo 1 asume que las concatenaciones de flujo totales íjjj se ext1en_
den a lo largo del eje directo y lo usan como Indicador del nivel de sa_
turaclón, el cálculo se realiza una vez antes de la falla, el tiempo ejn
pleado por éste modelo es de 224.2 segundos; en el modelo 2 en cambio
61
el c á l c u l o se r e a l i z a en cada uno de los pasos de I n t e g r a c i ó n incrementándose su tiempo de'computación a 252.6 segundos.
£1 modelo 3 en forma más correcta u t i l i z a ij^ como i n d i c a d o r del
nivel
de saturación para encontrar kd, éste c á l c u l o se, r e a l i z a una vez antes
de la f a l l a empleando un tiempo de 224 segundos; el modelo 4 va actual i z a n d o el c á l c u l o en cada uno de los pasos durante la integración
de
las ecuaciones diferenciales y su tiempo de computacion.es de 251.2
se
gundos.
El modelo 5 introduce la saturación para los dos ejes; pero utiliza
al
igual que el modelo 1, ijjj como indicador del nivel de saturación y
ade
más asume que kq = kd, el cálculo se realiza una sola vez antes d e l a f a
,11a y emplea un tiempo de 224.6 segundos; en el modelo 6 en cambio
el
cálculo se realiza en cada uno de los pasos de integración incrementándose su tiemoo de computación a 251.6 segundos.
El modelo 7 u t i l i z a en forma más correcta a \¡)^¿ y if^q como indicadores
del nivel de saturación oara encontrar k¿ y k q , éste cálculo se
realj_
za una vez antes de la f a l l a , el tiempo empleado es de 225.7 segundos;
en el modelo 8 el -cálculo es repetido en cada paso del proceso de inte
gración, empleando un tiemno de 252.7 segundos.
El modelo 9 al igual que los modelos 1 y 5 u t i l i z a las concatenaciones
de f l u j o totales \^ para encontrar los valores de k^ y kq, éste
cálcu_
lo se realiza sólo antes de la f a l l a , empleando un tiempo de 227.3
se
gundos; en el modelo 10 el cálculo es actualizado en cada paso del pro_
ceso de integración, incrementándose por tanto el tiempo de computación
a 255.6 segundos.
62
El modelo tomado como Referencia emplea un tiempo de 240.6 segundos.
De éste análisis y observando los resultados se puede notar que los mo
délos 1, 3, 5, 7 y 9 producen resultados similares entre sí y muy ce_r
canos al modelo tomado como referencia mientras que los demás modelos
(2, 4, 6, 8 y 10) presentan diferencias, notándose éstas
los 6, 8 y 10 en los cuales la saturación se presenta
en los mode-
páralos dos ejes •
además analizando-los tiempos dé computación empleados por cada uno de
los modelos se puede ver que los modelos que emplean un menor tiem_
po son los asignados con los números i, 3, 5 S 7 y 9 ya que éstos uti_
lizan el método de cálculo "una vez" es decir ahorran tiempo ya que
en_
cuentran ifiy, kd, kq una sola vez antes de una falla mientras que los mo_
délos Z3 4, 6, 8 y 10 van actualizando éstos valores en cada uno de los
pasos durante el proceso de solución de las ecuaciones diferenciales; é_s_
te ahorro en cuanto al tiempo de computación es de 14% aproximadamente
y además es un 12% menor que el tiempo empleado por el modelo tomado cp_
mo referencia.
cOÍ
31N3 M«0 3
'iz '
• & "' G1 •'
H( '
¿T " '"9Í '
J S?
,
_^U.—/-X--.1-..,
^ ' "
4ií¡ .._.
-,^-.P..
^
S!
*0l
*
; í'. t;rrr:^TT.~T
m£¿
Tí .
..,
.^•-/Ui-,
-—^í^j.
..^¿^^.,¿¿j..jj.^
^^ii^^pliíl^'i.or':
¿^/:l fiitiipil i
: :;;:i^^i^p|ili^|p:!lJ|Üll;
E1 .
iE;¿ ^í.: v • i, }\|
'• " rl
oi's/s'v'z 'soisaovj
M« ^JTÍTi^iliniillijiiSlil-iiii^liiiiilli
' "ÍZ'" ' SZ '
- SYÍJOZYnY ISSjJO
'
"
::im:ii^: rp:";;•";j:'^;T""^"';'^"t-^''--— "--!""-i
•--•: f TÍ:'";.!!r^:/ri:Li":j.^
ID, . • • ; . ; : • . | - : ; : t 10 "i;.:
.:::i;:;:|;;;::. to .;;;;:
....,i
n
oí
—i
O
oí
10
, .,,
..,,,.,
. ., ¡ .
,
;
i G r rrr -
.17
1
•oí
r^ij;.::^ ^ . . . > - : . ; . ; - . 1
'.:, i. 1 . '.
Üt
'~ :
•"•
i
'.i -.: :
to
^H-y
S9
- i ::::•;: ¡ . .
:trr:r-.-- }-:':•
:,!,:;,.;., ^L::!.;--,
- ; - ¡ . . . i . . ' : : . ..! : .t:;.it¡.¡.¡
'
m
;-::r :::;:::::•. t;i:n:¡;T:-¡:::;"::-v ;•:::::• :-T:; -y.- 1 ••.;.:—: \ - r - i •.^•''•':'':'\'.r-\
,,,,-,. .:.::.;::.:.::
i
i=:=T;-i. .^;-.N¡ : ::! ; ¡ 1
•::-{*••-*•:• . r
...
;
: " : :-"::.:;:i;:il;:»n:n" • :;:!:;; ; :.;r! ":::;::; - "í : -"
\rú-^^-^-:^^
íVir^í::;;^:^.--- 1
::";:i;- -:;::": ';"•;;• :¡r::!'"::! ":í:::-í:":: !::i::":;:" >•; : • ; , - : • ; • - : • ; : .*:;. r
: . : • : : . . • :;• ' . ' . ' . '
'.:•:!;::.
•::•:-:
i .:••.:,-:.
i
•
• •
::;
. : : - . - j ;•.;;:. ¡ v • i ; • • ; • . : ¡ .' : .. 1. •:•.:::
: n! : ' : i !; f -T;- < : MH ; ;p:'p--: : "-i-:::j;"-iv--:-:'-i"";:::- .:..:..;.;... .i.... ¡.;:;¡..:; ::\
..:;;..'.....-. . . ( /... . - .
~y \ \
"ttr-í
-~^~ri"
U \1 '_
.,....,-:.,
. ....
te
:: O
' • v - : I : !"!i::::::::iV..;:
:-;;:•:> : ^ ;¡ :»i:..-í-:::.
'-.^ . . . . .
:::::::
-•
i•
•
l
'••• ••• •'
t •• -|
• • • • • ; • '1 • • ; • • . .
! "
^ _tj~-.
l™n-i-':^!;:!T:!;';¡ . -
Piinr'i^i^P ^ii;-;!v.;íi!!:l»ii!;:-:;--:-:.
' • : . ; . : • : .:-.. '1 :..:;..;:!.-. ;..
:. ::::
• •::"-.:.."::.'«|"'::.::.¡:.r-:---:::!-:!:¡ :::;::;:. .:::;-r::r:;::::-::¡
: ir
UJ
-.::::;!::•::.-irf. <M O
::»r ^
:
j ; ; J
'»i": i. - ' : = ; :
u*
r*1
"O
en
•.:;;.:::::.-'.; .¡: !;:;;•
h-f
'Oí'
o
-r-rr"
•::::;•;•
I í:;i;
l""i:
Z!
CD
•:v:^.v. - r .
::. i\ •• .-;•
en
'.i:"'----'
—i. . .
:i|!!!i{l=:;¡i:!:!ili;i!!i=i::-cr
lüL
•- 1 . .......i... ,....»... j........ I-.- . . . ,.,......
ü - JliiiiliiiiiHiliyilií =: o . - . i::!:!:::
i!!!p!!|!:![!;i!!!!];i;i-^:
:
:
::i:i:;!;:.:!::::!::::í::::;::: Í> ..:.:!.:: ;:::
!"'J;":::
-H¡::7::-:
::J!-:ifr:::i::::--:- H
!.;!'.
!:t!::::::::¡:r::i:;i;j::::;::' f^ " ' .\'. ".'.i' ~
:::i: ::¡:;::::i::J::::í::::l::::Í;" ? — i ; : : . i :
-_i: i; n:-:— :¡^;:U:i:i:™.u. J* . ....';L~..|~;
::.;• ::j:i:i;::::;:i::Í::::¡:::-;::. 2
::.,. -•¡. :;;:.".[:. •:[:•::!::;:::: -^
*Tí:"T:~*;":*:rtrr:':7r:::::.
•^
^
x
:
-
.:'•::"• Hl1.:::
... ""^-oN> . ; . - -:- ' • '
- ::.:.:;•.
.* l-::':L:. '"
::":: i: vi":".:
*>
rc
c_
O
•i::-:t:-:r
O .:
m /m •-•"
c- ';'.
IT1
"7:7!"
;::Ü;
•i::::);
"" : '"" T: ::i:
/o-
:(:•: l:
.i::-:i-
• i •. • r : i •
3'
•i-
-I
1
o
':
:
MÍ
m
'". • 'u\ • tui; : ' :" • ' ( , * ' i' ';. cjí
"''"
ro
•• -oí
oí
•
,»>
H^\. .;;
•l::::¡:
:i::::l.,::p
zn
CD
mmm&
:i;:::!:ü;li
' ' í::::!'
' • ' " ' -
r.)
t.*
,_f, :;;h :i,,ji:. ,r':;
:-;•;:;[, .^'-^.\^
*-;inM:i.
>-i ::il:;;^':r-r;- i a-;;^-:':
j •. •
,,|,,,,
, ... . _ .
;, . .
„ , . , . . , O ..-..,;:,::, •„
.| ; .¡-.r-.g
;
:
::..J
:(
¡2
(2
:
:;
[
;
__
1
- - -
"'¿¿"""TíK:;;!;
. < .. i i
I
.l...:i:
r ' .
.
-
i.:. 0
\r••••'-. i ••;!! -^-r-V^-^hn-! -viv'"^ 77717 "-'-'--!'""^^"^^---'----'
:..T...:r
-Q...::: •
= cr
_j
-
ce
15
QZ
. "TT^r" ¡ - ; T ~
! í
SI
ST
¿T
_2;_.:._
si
51 '
*!
u
r.i
TT
:;¡.... ¿TTT.I ... rT¡r; i. .T"l. .. i . r¡.i... I"7rv:; . i™I":";~itT7i~¡ t™ ITPTJT*. • 1 .Y;77.~
^/^••'^•[^^
• i - . ' • ; . : : . . - • • • : : | i - : : * - . : :.-;:} :; í.:;:i.;::(::::!..: !::-;|::-:|.-::r;::J. Ti::.: .::-(:;::|t:
~~^TTTT~7
:,.: :..:; .:,.:'TO r'^^l^l:;:;;-^^!^^l^tt
• - ; • : • : • : ••--:i_^^;:^:-K:;r:-f::::i.^:;:;¡:.::|:p:;j^
v":
ot
'1
Tí:r
.:-rnnrr:iirnMv¡r;";;"-i::;:];::vn;;r;;|:;:::;:;;¡::;:in
:
:
"";.;ri::.:!~:r:~:;;ni:;ri™i:::nr:;
:
A': vi13a '"Noiov¡/\s3a
:
"H -Í":.Í '^^l^^'^-fíi^^FFl:-!^;^!! ::;:¡:::p;;::^:i:::i¡::::í;:^:j:;::::;:jji:
• : : - L - - ' - : - • :"-L:-;i""^'LU-í::^Tiíli!:i:y-JJ:iI:ii:ii:l:i=:]liü^
Íi;ii!;i;
;^j%iiUii:;::ii;
¡r:";:r"|.7::]::"n':r]:77:í-:::
:::L;;,::lj-:;!:;:-::;!i;::;:,:::;ili:;P¡i:::¿^
,! j • ^:^i L.!-;: iMlMJ::^::ii^i:Ni!:;:í!jii^!^-p HÜlÜlÜÜ^iü^P^^i1!
:•.;
"• : > ! " ' : ; n- ;"!;"::::::i";"r:li;|:::::"""
n"i:\ :niiv:7Hihrrli:':^ín-:i::nr::::¡rT::|ir:i ;i:7!nniT:
• ••
i:- :»:::::.::; :::(::: ! ::>. .::::-..:ÍT:¡:i::::|.r-T:::| ::-|:..'!:.•:!;;:: ::::p::.|;:
"" vio^3y3d3M- ¡ —;:™T ;—"¡'"^n^r^irnrríTrinTrrí:" ::i;TTrT¡"~ín^""íiTrrj.-.-. . . ... .-!.::::•;. i-.;:;::::i::::::;.:!.:.:!:::;!:;::!:i::I:L:!:Ü*I;UÍ^..: i;;;!i¡;i^iui-;: '¿ziz-l
. O! '8= 9^^ .SOT3aOW; :: r ; _, : ;..|':. : j: |i ||Í:;jj-:;p:¡:; I . j j : ^ ^
r--:
:---UD : T
•
r--- ;
.- o- -r
- ..
_ V \• .--• 1 ' -* < <:ir...,.;¡.;i.:|;}; frrr;^^.^.^,."-::
"777: pr7-rtnpT¡-..:rrrírrrrfn'.-:.:r
r^vp; "]
t-i!-—
i..;.
;i--i
L ^.' .
L-
i 4
t
i
j
_LL
;
I
i
i
i
10
J_J_J_ L
t
i
i
-. i
J :!
I — !
i i
3
iiiiiiil
__:; :j/:ÍX;:Í;^Lh^
_ FG.';4-2.8.-b,.
::::|:-::I:í::¡::"".
_J__
•
4
[21
REF.
10
9
7
6
3
4
3
2
odelo
N.-
/.)}
(fi.033)
(_ 0.033)
[0 •
CORRIENTE
EJE 0
-1 2..6É?
~Jt.*SO
-J2../&
(0.O2&)
(0.020)
(o. o?e)
EJE D
(P.u.)
CORRIENTE
jo. ir
JJ.f?
(o.
CORRIENTE
EXCITACIÓN
'fA>
7-7?
7.7 z
-7.
7.7?
-7-yg
- 8.03
fe>.03¿}
(0,03¿)
f 0*032)
(0.0 2. f)
(o.ozf)
0.
0. f
-o.ft
O, J
o. /
O.'
-c-77
O.J
0-79
I base-5.07
A.
produce
(0. 033
(¿5.033
(0.033
1*
(o.
(0.<?33)
0. í
SE
7.©¿>
DE
CONC.deFLUJ
EJE 0
(P.U)
RESULTADOS.
CORRIENTE
DE
( ) - V a l o r en paréntesis c o r r e s p o n d e al t i e m p o en seg. al cual se
HQ&Ho
tí i tifio
PICO
TABLA No. 2 RESUMEN
Observando las Figuras 4.2.1. a 4 . 2 . 8 . se tiene que:
En las Figuras 4.2.1. a y b se tiene la corriente en el eje en cuadratura para el modelo de referencia y los modelos 1, 3, 5, 7 y 9 y
para
el modelo de referencia y los modelos 2, 4, 6, 8 y 10 respectivamente,
observándose que los modelos 1, 3, 5, 7 y 9 coinciden
en sus
resulta_
dos; en los demás modelos se tiene que el modelo 2 presenta un
valor
de corriente un poco mayor al momento de presentarse la falla ya que
utiliza \|jj como Indicador del nivel de saturación produciéndose por e£
ta razón diferencias especialmente en los picos; el modelo 4
utiliza
^m¿ para encontrar el factor de saturación kd dando un mismo valor
de
corriente, se presenta una muy pequeña diferencia en los p.lcos con res_
pecto al modelo de referencia; el modelo 6 presenta las mayores
dife_
rendas debido a que Introduce la saturación para los dos ejes,
útil i
za ifjy para encontrar kd y además asume que kq = kd produciéndose un me
ñor valor de corriente al Inicio de la falla dando por ésto valores me_
ñores en los picos (especialmente en el primer pico); el modelo 8
tam
bien presenta diferencias ya que satura los dos ejes pero utiliza ^mcj
y ifj'rnq para encontrar kd y kq respectivamente, ésta diferencia es menor
que la que produce el modelo 6; el modelo 10 presenta un menor
valor
de corriente al momento.de la falla ya que saturas los dos ejes
uti!1_
zando tyj para encontrar tanto kd como kq las diferencias son
menores
que las producidas por el modelo 6.
En cuanto a . l a corriente en el eje directo, .observando las figuras
4.2.2. a y b se puede ver que los modelos 1, 3 3 5, 7 y 9 producen idén
ticos resultados entre sí y presentan una muy pequeña diferencia
respecto al modelo de referencia debido al método de introducir la
con
sa
81
la s a t u r a c i ó n , en cuanto a los demás modelos se ve que:* el modelo
2
presenta un mayor v a l o r de corriente antes de la f a l l a con relación al
modelo de referencia ya que u t i l i z a i¡/r para encontrar kd
produciendo
un menor v a l o r en el primer pico; el modelo 4 presenta un menor
valor
de corriente que el modelo anterior ya que u t i l i z a a ty m ¿ que es un va_
lor menor que i|/y produciendo un valor en el primer pico más cercano al
del modelo de referencia; el modelo 6 presenta d i f e r e n c i a s producto de
que Introduce la saturación para los dos ejes y asume que kq = kd
uti_
T i z a n d o ipy para encontrar kd; el modelo 8 satura los dos ejes u t i l i z a r ^
do i¡;mcj y if>mq para encontrar el factor de saturación kd y kq respectiv_a_
mente y da resultados más cercanos a los modelos que saturan solamente
el eje directo; el modelo 10 presenta la mayor diferencia ya que su va_
lor i n i c i a l es mayor pues u t i l i z a ijjy como i n d i c a d o r del n i v e l de
satu_
ración para encontrar kd y kq produciendo ésta mayor diferencia
espe-
cialmente en el primer pico.
En las figuras 4.2.3. a y b se tiene la corriente de fase, observándose idénticos resultados para los modelos 1, 3, 5, 7 y 9, sin
s i g n i f i c a t i v a s diferencias con el modelo de referencia;
producir
en cuanto a
los demás modelos se tiene que: ; las mayores diferencias se producen p_a_
ra los modelos 6 y 10 em los que la saturación se introduce para
los
dos ejes y a d e m á s ' s o n los que u t i l i z a n ijjy como i n d i c a d o r del nivel
.de
s a t u r a c i ó n ; los demás modelos presentan menores diferencias las mismas
que son producto de las respectivas asunciones que hacen cada uno
de
ellos.
En las figuras 4 . 2 . 4 . a y b se tiene la corriente de excitación
el modelo de referencia y los modelos 1, 3, 5, 7 y 9 para el
para
modelo
de referencia y los modelos 2, 4, 6, 8 y 10; notándose que s e . d a n prá£
ticamente los mismos resultados para los modelos que u t i l i z a n el
métp__
82
todo de cálculo "una vez", para los modelos restantes se nota que
m
se
presentan pequeñas diferencias en los picos de las curvas producidas por las diferentes asunciones de cada uno de los modelos. Todos
los
modelos implementados en éste trabajo presentan una apreciable diferen
cia en el valor del primer pico lueqo de producido el cortocircuito con
respecto al modelo de referencia la cual desaparece luego de que
osci
lando la corriente se establece en un similar valor de corriente de es
tado estable.
En cuanto a las concatenaciones de flujo del eje en cuadratura, observando las Figuras 4.2.5-. a y b, se puede notar que los modelos 1, 3, 5,
7 y 9 dan idénticos resultados y.no producen diferencia significativa
con respecto al modelo de referencia; observando los resultados de los
demás modelo.s se tiene que: el modelo 2 tiene un valor un poco
mayor
el momento de producirse la falla produciendo por tanto un valor un po_
co mayor en los picos ya que utiliza ^ para calcular el factor de sa_
turación; el modelo 4 tiene un valor menor al modelo 2 el momento
de
producirse la falla, produciendo los valores de los picos similares al
modelo 2; el modelo 6 utiliza tyj para encontrar el valor de Kd y asume
además que el valor de Kq es igual a Kd produciéndose por esta razón valores en los picos mayores a los demás modelos; el modelo 8 utiliza
^md y ^mq Para encontrar los factores de saturación kd y kq respectiva^
mente produciendo un valor en el primer pico similar al de los modelos
2 y 4; el modelo 10 presenta una mayor diferencia en el primer pico res_
pecto a los demás modelos y al modelo de referencia ya que utiliza \pj
como indicador del nivel de saturación para los dos ejes.
En las figuras 4.2.6. a y b se tienen las concatenaciones de flujo del
83
eje directo, observándose que los modelos que utilizan el método
t
cálculo "una vez" dan Idénticos resultados; en los demás modelos
de
se
tiene que: los modelos 2 y 4 que sólo Introducen la saturación
para
el eje directo proporcionan similares resultados sin presentar
una
significativa diferencia con el modelo de referencia; el modelo 6 pre_
senta diferencia ya que Introduce la saturación para los dos ejes utl
lizando fyj para encontrar kd y luego asumir que kq = kd; el modelo
8
satura los dos ejes pero utiliza i|;mc| y i|^q para encontrar kd y kq re¿
pectivamente produciendo similares resultados que los modelos 2 y 4 ;
el modelo 10 presenta la mayor diferencia en los picos con respecto al modelo de referencia y a los demás modelos ya que utiliza ijjy
para
encontrar los valores de los factores de saturación kd y kq.
En las figuras 4 . 2 . 7 . a y b se tiene la.desviación la de velocidad
tornea, observándose que los modelos 1, 3, 5, 7 y 9 producen
ro_
Idénti-
cos resultados entre sí y oresentándose una muy pequeña diferencia con
relación al modelo de referencia debido a la forma de Introducir la sa_
turaclón; en los demás modelos se nota pequeñas diferencias producto de los asunciones que hacen cada uno de los modelos, estas diferencias
también se deben al factor de multiplicación utilizado para la gráfica
clon (1000) que hace más notorias estas pequeñas diferencias.
En cuanto al torque electromagnético, observando las Figuras 4 . 2 . 8 . a
y b se nota que los modelos que utilizan el método de cálculo "una ve¿'
dan similares resultados: en los resultados de los demás modelos . se
tiene que: el modelo 2 presenta un mayor valor, al momento de producirse la perturbación y también un mayor valor de pico ya que utiliza
ipj
como Indicador del nivel de saturación; el modelo 4 tiene Igualmente -
84
un mayor valor al Inicio de la perturbación y un mayor valor de
pico
pero menor al que se presenta en el modelo 2 ya que utiliza ^mcj
para
encontrar kd (\¡)^ en menor que i|jy); el modelo 6 tiene un valor
menor
al inicio de la falla y produce un mayor valor que los anteriores mod_e_
los en el primer pico ya que utiliza i^y para encontrar kd y luego
me que kq = kd; el modelo 8 presenta un valor menor que los modelos
asj¿
2
y 4 al inicio de la falla ya que si bien introduce la saturación para
los dos ejes, utiliza ij;mc¡ y ijjmq 'para encontrar kd y kq respectivamente,
en el primer pico positivo y luego en el valor en el que se
establece
produce similares resultados que los modelos 2 y 4; el modelo 10 tiene
un menor valor que todos los demás modelos al inicio de la falla,
pro_
duce s i m i l a r - v a l o r en el primer pico que el modelo 6 ya que también uti_
liza ijr¡- como indicador del nivel de saturación para encontrar kd y kq.
85
C A P I T U L O _V
'CONCLUSIONES Y RECOMENDACIONES
5.1. CONCLUSIONES
El presente trabajo ha planteado varios métodos alternativos para la s1_
mulación de la saturación mediante el cálculo de los factores de satura
ción los cuales son usados para modificar las inductancias mutuas
den
tro de las ecuaciones de la máquina sincrónica, con el propósito de i]n
troducir la no linealidad del hierro ya sea en el eje directo (4
mode
los) o en los dos ejes (6 modelos), producto de lo cual se llega
a las
siguientes conclusiones:
- La introducción del efecto de la no linealidad del hierro utilizando
para ello los factores de saturación en vista de los resultados.no de
pende mayormente de la forma de encontrar los mismos (lo cual es más
• notorio en los model.os que.usan el método de cálculo "una vez"),
ya
que por ejemplo utilizando un- factor de saturación separado para cada
eje basado en las concatenaciones de flujo ^mcj y i()niq respectivamente
(modelos 7 y 8) da resultados aproximados a los que se producen si se
utiliza las concatenaciones de flujo totales ijjy (modelos 9 y 10) pero;
en cambio, aquellos son más sencillos y emplean un menor tiempode.com
putación.
- Ha sido de importancia en éste trabajo el encontrar que el método
de
cálculo "una vez" produce resultados cercanos a-los resultados que pro
duce el método de cálculo "paso por paso" pero la ventaja del primero
86
radica en el ahorro que_produce en cuanto al tiempo de computación.
- El método de introducir el efecto de la no lineal i dad del .hierro utj_
lizando factores de saturación, los mismos que se usan para corregir
las inductancias mutuas, proporciona resultados similares al
modelo
tomado como referencia en el cual se corrigen las concatenaciones de
flujo por medio de una función de saturación, demostrándose asi
la
confiabilidad de los modelos.
- Todos éstos resultados son válidos cuando la máquina está trabajando
sin gobernador y regulador automático de voltaje.
'
5.2. RECOMENDACIONES:
•
Se recomienda utilizar los modelos que utilizan el método de cálculo "una vez" debido al ahorro en cuanto al tiempo de computación frente a
los modelos que utilizan el método de cálculo :paso por paso" y al me_
todo tomado de la Referencia
2 de aproximadamente 14% y 12% respe£
tivamente en vista de que proporcionan resultados aceptables.
Desarrollar un método que permita determinar la característica
en
va_
cío del eje en cuadratura de la máquina sincrónica y utilizar la misma
en la determinación de los parámetros del eje en cuadratura de la
m^_
quina sincrónica.
Utilizando las características de vacío en los dos ejes, modelar la ma_
quina sincrónica para estudios de estabilidad de Sistemas Eléctricos de Potencia y comparar sus resultados con estudios similares utilizando la curva de saturación
en el eje directo.
87
A P E N D I C E
A
MÍNIMOS. CUADRADOS
Los polinomiales son frecuentemente utilizados en la técnica
de
la
"Curva Adecuada"-. .Generalmente el polinomio de grado n-1 tiene la for_
ma:
y = Ci + C2X + Cax* + . . . + Cn Xo"1
donde:
fi(x) = 1
fz(x) = x
fa(x) = X 2
.cfn(x)
f ..\~ i- x
-.
Los mínimos cuadrados adecuados de un polinomio de grado n-1, tiene
n
puntos dados, y la curva pasa por supuesto por todos los puntos dados
de tal manera que los residuos sean cero.
Para, ilustrar mejor el procedimiento general.se va a considerar una fun_
clon y = Ci + C 2 x z donde los datos serán (XL, yj; (xa., y2); (x3, y3);
(xit, yi,), lo qué se muestra en la siguiente figura:
88
C a +C 2 X 2
De los cuatro valores conocidos de x e y, se puede escribir las siguíen_
tes ecuaciones:
v
Ec. (A.l)
GI + C2(x3)2 = y 3
rLI -r+ Lp2 vxi
/v }\; _ -w y4
donde Ci y C2 son los valores desconocidos, como se puede ver el numero de datos es mayor que el número de incógnitas, por lo cual no se p<3_
dría resolver, pero, por medio de la técnica de mínimos cuadrados este
problema puede ser resuelto, y la ecuación (A.l) puede reescribirse co_
mo:
Ci + C2(xJ2-
89.
Ci + C ? ,(x,) 2 - y 2 = r,
Ci + C 2 ( x 3 ) 2 - y 3
=
r3
Ec. ( A . 2 )
Ci + C 2 ( x L ( ) 2 - y i» = r,,
donde T I , r 2 3 r 3 - y 1% son los residuos los cuales serian cero en el ca_
so de una curva perfecta; sin .embargo, éstos pueden no ser cero, y . l a
curva más aproximada se la obtiene haciéndolos lo máspequeños
posible,
para lo cual la suma de los cuadrados de los residuos sea m í n i m a ,
es
decir:
n
2
( r - j ) 2 = mínimo
•
-.
'
Ec. ( A . 3 )
Por tanto:
= O
para k = 1, 2, . . . , m
Ec. ( A . 4 )
Para el caso p a r t i c u l a r ' d e la Ec, ( A . 2 ) , tn = 2 y n . = 4 y se tiene
Oyi
O vrf 1
O*-'l
O v¿ 1
C* ^* 1
Ec. ( A . 5 )
3ri
+
8r 2
+ r
9r 3
+
j r ^ •_
Q
Observando la Ec. (A.2) y tomando cada una de las derivadas parciales
de la Ec. (A.5), se tiene:
90
r\
o o 2,
Y 2.
5
Xl '
^1
l"2 _
rxp
v
A2
2 . ^3 _
y
o v2
r, p
v
A
2 .
3
,
o L> 2.
« p
—
A tj.
d o2
La ecuación (.A.2) puede ser expresada como:
r.¡ = Cx + C2(x-i)2 - y-¡
para i = 1,2,3,4
Sustituyendo esta expresión y las derivadas parciales en la Ec. (A.5),
se obtiene:
4
4
4 d + C 2 2 x-i2 - 2 y-j =--0 •
1=1'
1=1
Ec. (A.6)
4
4
f\ x.¿j2 +A-^ r. ^ ?U y ¿j- 1 * A^
- ?
^1
2
1=1
1=1
v
4
-¿j Y .J^-^2 =A-i n
U
1=1
la cual puede ser resuelta simultáneamente para encontrar las incógnitas Ci y C2.
Para el caso de un polinomio de mayor grado, se tendrá que resolver un
mayor numero de ecuaciones simultáneas por lo que el computador es
n_e_
cesarlo de utilizar.
Para el caso del presente tirabajo se ha utilizado un polinomio
ma :
y = CL + C2 x + C 3 X2 + U X 3 + C5 x 4
para cuya resolución se ha usado un programa presentado en la Referen
cia
12 .
91
A continuación se presenta la curva Ea = f(1-p d ) 3 teniendo en cuenta que
e n ~ v a c i o E a = ipmcj ya q u e :
y
Ea
en vacío
id = O ,
•'•
=
( x d - X q ) i d + X ad 1 fd
1^ = O
*md
= x ad' 1 fd = E a
PJT
ro
Z'O
£"0
- St>
2'0 i
• '- • ' t . . . . . , . . . , - . . » ,
j "•- •'-
.•.::.
i.~- '".
'"" —t™
n "'
';
1
T . . ! . . . . i. ... i . 7T
¡~Tr7i—'—t ••;; ;•;
.i
J.
i...í .
™—'' ".'." ~~~i—T"—T— —'.... .i.-. —'. í Z''.'—.'"' í^ II" i . t l , .rCVIT""! / " . ' : . " . . . " . . . . < - . - . . . . .
: : : : ; : : : : : : ; : : : : : : :
• ••^."iij• i-Lii-m _ n " i -'-Ti"i
'•-••!•••••••;;};"";-!-•*_!•.•'_!::*;t•_•_'-- 'r : —-t^~;''r'-'J—— - '" ji'.''"ul.^"/ '".1111'":,-!"'':!'-i-U^-^"''
^^^íSTüiuiiinnír7
9-0-
:i::::i:
iPI
:}=-|::
"•i:
'.::::[
••:-:::::rr:::l::::I:::- ÍÜÍILÍ-:Íir:""*":iÍ
':i:-:íjn::::::TiH:nTH:
6'0 -'
3Q
-^9 -
93
A P É N D I C E
B.l.
TITULO
: "SIMULACIÓN DE MÉTODOS DE SATURACIÓN PARA EL ANÁLISIS
DE LA MAQUINA SINCRÓNICA"
B.2. OBJETIVO
: Simular varios modelos para considerar el efecto de
la no linealidad del hierro magnético en el comportamiento estable y dinámico de la máquina sincróni-
ca.
B.3. MÉTODO
: La máquina sincrónica para estudios de estado
esta_
ble y dinámico está definida por un sistema de ecu¿
ciones de primer orden.
Las ecuaciones están
plan_
teadas en forma implícita y son modificadas por me^
dio de factores de saturación para introducir la no
linealidad del hierro.
Los factores de saturación son obtenidos de la
va. de.circuito abierto de la máquina sincrónica
cu_r_
y
el sistema de ecuaciones se resuelve utilizando el
método de" "Runge-Kutta" de Cuarto Orden.
B.4. DESCRIPCIÓN DEL PROGRAMA:
El programa digital consta básicamente
principal y de seis subrutinas:
del
programa
94
- SUBRUTINA VAYCOD : validez.de datos.
•
- SUBRUTINA CONINI : condiciones iniciales.
- SUBRUTINA SATURA : introducir saturación.
- SUBRUTINA COEFI
: cálculo de coeficientes'de las
ecuaciones diferenciales.
- FUNCTJON RUNGE
...
- SUBRUTINA PLOT
: solución del sistema dé ecuacio_
nes diferenciales.
: obtención de resultados gráfi-
cos. •
A .continuación (hojas siguientes), se describe el pro_
' grama digital en forma de diagramas de flujo
en las
que se puede observar la interconexión de los diferen_
tes elementos del programa.
.ID
CT>
1
ico*-- O
96-
97
* v£>>
c/<j ¿"2)
5JT
-
98
ro
G
PC*).
C
99
001
101
C
C
/e e r
Cosrz
c
c
ro
= ¿./(U.
C
O
102
103
B.5. NOMENCLATURA : A continuación se detallan las variables de entra_
da y salida que son utilizados en éste programa.
B.5.1. .VARIABLES DE ENTRADA
SÍMBOLO
FORMATO
DESCRIPCIÓN
RS
F 10.5
Resistencia de armadura.
RKQ
F 10.5
Resistencia del devanado amortiguador del
eje
q.
RKD
F 10.5
Resistencia del devanado amortiguador del
eje
d.
RFD
F 10.5
XLS
F' 10.5
• Resistencia del devanado de campo.
Reactancia de dispersión del devanado de arma_
'dura.
XAQ
F 10.5
Reactancia de magnetización del eje q.
XAD .
F 10.5
Reactancia de magnetización del eje d.
XLKQ
F 10.5
Reactancia de dispersión del devanado amortiguador del eje q.
XLKD
F 10.5
Reactancia de dispersión del devanado amorti_
guador del eje d.
104
SÍMBOLO
FORMATO
DESCRIPCIÓN
XLFD.
F 10.5
Reactancia de dispersión del devanado de campo.
HMAQ
F 10.5
Constante.de inercia de la máquina,
VAERI
F 10.5
Velocidad inicial del rotor.
VAEB
F
Velocidad angular eléctrica base,
VA
2(F10.5)
Voltaje terminal -fase neutro,
PHI
F 10.5
Ángulo del factor de potencia.
.KVA
F 10.5
Potencia aparente monofásica.
TMAX
F 10.5
Tiempo máximo de observación del fenómeno..
10.5
F 10.5 ' Paso de integración de las ecuaciones diferenciales.
IFREQ
12
Contador de frecuencia de los pasos de integra^
ción.
IFPLOT
12
Indicador para obtener
resultados: O para 1i_s_
tados; 1 para listados y gráficos.
IDIST
12
Indicador para producir-perturbaciones.
105
SÍMBOLO
FORMATO
DESCRIPCIÓN
TPERT
F 10.5
Tiempo de inicio de la perturbación.
TINC
F 10.5
Valor de la función escalón para el incremento
brusco del torque.
VFINC
F 10.5
Valor de la función escalón para el incremento
brusco del voltaje de excitación.
12
Indicador para el tipo de funcionamiento: l"pa_
ra motor y 2 para generador.
ISAT
12
Indicador para el modelo: O no saturado y l'p_a
ra el saturado.
IMODEL
12
•Indicador para escoger el método de saturación:
1, 2, 3 , ' 4 y 5.
INDI
12
Indicador; O para el cálculo "una vez"; 1 para
el cálculo "paso por paso".
NSA
16
Factor de m u l t i p l i c a c i ó n de la corriente d e ' f a
se.
NIQ
16
Factor de multiplicación de la corriente en el
eje q.
106
SÍMBOLO
FORMATO
DESCRIPCIÓN
NID
16
Factor de multiplicación de la corriente en el
eje d.
NIFD
16
Factor de multiplicación de la corriente de exci_
tación.
NSQ
16
Factor de multiplicación de la concatenación de
flujo en el eje q.
NSD.
16
Factor de multiplicación de la concatenación de
flujo en el eje d.
NVR
16
•
Factor de multiplicación de la desviación de la
• velocidad rotórica.
•ND
16
Factor de multiplicación del ángulo de potencia.
NT
16
Factor de multplicación del torque electromagn£
tico.
NAO
16
Valor de la escala superior del gráfico de
la
corriente de fase.
NQO
16
Valor de la escala superior del gráfico
corriente en el eje q.
de la
107
SÍMBOLO
NDO
"FORMATO
• 16
DESCRIPCIÓN
-
Valor de la escala superior del gráfico de
la
corriente en el eje d.
NFO
16
Valor de la escala superior del gráfico de
la
corriente de excitación.
NW
16
Valor de la escala superior del gráfico de
la
desviación de la velocidad rotórica.
/
NADO
16
Valor de la escala superior del gráfico del ángulo de potencia.
NTO
16
Valor de la escala superior del gráfico del
. que electromagnético.
NSPQ
16 "
Valor de la escala superior del gráfico de la
concatenación de flujo en el eje q.
NSPD
16
Valor de la escala superior del gráfico de
concatenación de flujo en el eje d.
AEI
F 10.5
Ángulo eléctrico inicial de la perturbación.
la
108
B . 5 . 2 . V a r i a b l e s de s a l i d a
SÍMBOLO
DESCRIPCIÓN
CIA(I), 1=1,5
Vector que almacena: las corrientesen el eje q,
en el eje d, de fase, el torque electromagnétj_
co y la corriente de excitación.
Vector que almacena: las concatenaciones de flu_
jo en el eje q, en el eje d, de los devanados
damping, la velocidad rotórica y el ángulo de
potencia.
AIQM
Valor modificado de la corriente en el eje
q
para ser graficado.
AIDM
Valor modificado de la corriente en el eje d p_a_
ra ser graficado.
AIFDM
Valor modificado de la corriente de excitación
para ser graficado.
DELTAM
Valor modificado del ángulo de potencia
ser graficado.
DVRSM
para
. .
Valor modificado de la desviación de la veloci_
dad rotórica para ser graficado.
109
SÍMBOLO
DESCRIPCIÓN
TMM
Valor modificado del torque electromagnétido
pa
ra ser graficado.
PSIQM
Valor modificado de la concatenación de flujo en
el e.ie q.para ser graficado.
PSIDM
Valor modificado de la concatenación de flujo en
el eje d para ser graficado.
AIMAN
/
.
Valor modificado de la corriente de fase para ser
graficado.
B.6. CARACTERÍSTICAS
Dada la forma de realización del programa, éste esta en capacidad de lis_
tar la variación de 12 parámetros en función del tiempo y la graficación de nueve de ellos; sin embargo, si se desea aumentar o disminuir
esta capacidad, se lo podría hacer fácilmente con pequeñas modificacio_
nes del programa.
B.7. FORMA DE PROPORCIONAR LOS DATOS
Para el análisis de la máquina sincrónica, se deben introducir todos los
datos indicados en las variables de entrada, los mismos que se deben
proporcionar en p.u. a excepción de la velocidad angular.
A continuación se presenta el esquema de entrada de datos y los esquemas
que indican la forma de utilizar el programa grabado en disco y en cinta
110
ESQUEMA No. 1.- Forma de proporcionar los datos.
ESQUEMA No. 2.- Forma de utilizar el programa grabado en disco.
ESQUEMA No. 3.- Forma de utilizar el programa grabado en cinta.
B.8. RESTRICCIONES
- Sólo se puede introducir la saturación mediante factores de
satura
ción que modifican las ecuaciones diferenciales.
- Se plantea el modelo matemático de la máquina sincrónica utilizando
como variables de estado a las concatenaciones de flujo.
.
P
£
5 6 7 8 9 0
1 -10
i
DE
6
I
6
I
6
I
6
I
6
I
NPSQ
NP
NT0
NA D 0
NW
I
6
N S3
5
5
6
I
6
I
I
6
L6
N1 FD
5
5.
6
I
NPS D -
6
I
NSD
1
-
F1 0 .5
AE
6
I
NV R
ES C A L A M 1 EN T 0
F I 0. 5
V AER I
I
6
ND
D0 S
5
F1 0. 5
F 1 0
MU — T I P L 1 C A C I 0 N
NI D
.
KV A
C UA T R 0
2l3
FI 0
FI 0
N1 Q
v~»
«
!5
F 1 0
F? H I
_
i
FI0
F I 0. 5
N gA
9|0
4 1-.50
¿ 5 '-> 7 a
— —i —r —i—i
•i
S Q U MA N o
a
X LS
Y
7
5 5 7
1- 4D
CA D0RpS
¿
I2 I2 I2
5
V-
1
B
2 3
. Fecha:
RFD
•
ND
i
:
1
9
i
2
6
NT
T AR
2
I
1
T AR
0
DE SATURACIÓN PARA EL ANÁLISIS
RKD
F I 0 .5
I
8 9 0
F I0. 5
E
5 6 7
21- 3C)
NA
i.
T P i. R T
1
3
F1 0.5
V A
U
2
H MA Q
5
5
5
i
MA Q
0
X LFD
r\
A
9
X L KD
FI 0
5
0
F
0
N
I
I
V F
F
-;
5 6 7 B
1 20
Ft 0
5
£
DE
3
RK Q
.
2
RS
F1 0
T i N c-L*
F t 0 , 5
V A i- B
A R A Mp T R 0 S
2 3
- FA CT0R ES
_
1
Programador
NOMBRE DEL PROGRAMA SIMULACIÓN DE MÉTODOS
INSTITUTO D& INFORMÁTICA Y CÜMP
/
/
*
/8
3
i
L
3
••
-
%
E0J
Ai3 S G N
5Y
c
i
?
i
-
-
UA
./ L B i
-
1
3
1 €
>o
R?
U iN T /\G
0 N T RSÜ
S Y S -/ L B ? X
1 J SYS
DAT0 S
E)<E j
•N
c
U
*\/
DE
-
i 7 8 9 0
11-20
3 4 5
•>
j
•
N0MBR
TA
o
0
7 8 9 0
A S5 S G N
DL.B
J 2J B
íü
5
1-10
AF
?
T
*
/
/
/
/
2
/
_
1
Programador
i
-
R A MA S
DE
-
j
21-30
2 3 ¿15
D
7
i
31-40
B
—
~
Dc
£
•
J
Ai
EN
-
D
No
MA
SQ
-
41-50
> 7
J
2 3 i S
9¡0
3R A B A D0
~ L E ^^ T R 1
7
2 3 ¿ 5 6 7 6
R Í 3 R A MA
-
8 9 0
"Fecha:
i
-
-
i
2|
-
-
S ^> 0
2
8 9 lo
NOMBRE DEL PROGRAMA SIMULACIÓN DE MÉTODOS DE SATURACIÓN PARA EL ANÁLISIS
T v^wivir
6 7
-10
5
e
/
-X
/
/
&
*
//
/
EC/
i
11-2 D
RE
*
Y
28
S Y S I P T ,f
Y
A
)C i
_A
D
21- 30
< 15 j 7
3AR
: J. i10 l\c¿A P
JÍ?L. 1 £5 T
J QEL
* A 1
-1 /\
D
2 3
PT1 X 1 2 £ 0 i
2 8 C) ' 1
L 1 N K fE D T
o
^í
cu E^ T.C
'NT
C{¿
~ F 0R1: R A rJ
LI r
cAr
S YS 1
„
¿ 5 5 7¡8 9 0
i
0 PF FÍ A D ?IR
[) A T 0
E,3 >.
í/ T C
'
EXE
A S O V.5N
EX
V
X EC/
A T 1 cN
r
DE
p S —.
7*'
<t p T I 0 N
MT 3
/t
/,
/f
0
N Í vi B R E
P A U£ E
J 0B
A - SGJ N
ti
1
ARJ ETA5
¿
/t
/,
//
.
1
3
Programador_
i
B
2 3 L
c1
NT A
p
•
£
_ Ec T R 1
•x
EN
A
Q
N2
¿KSO
^ 5 i7
5 Q J E MA
2 3
3RA BA DÍ
DE
7
5 6 7 8l9l0
3 1- a)
R 0 3 R A MA
8 9 0
Fecha:— :
N
! [ 2!
o
NT A
3
8 9Í0
NOMBRE DEL PROGRAMA SIMULACIÓN DE MÉTODOS DE SATURACIÓN PARA EL ANÁLISI
I II u i v uc
•
1
a y u
0
--
D
9
70
3
082 04
0 . 02
-—
~-_
20
85
-
3 49 8
7
0,
5
1
80
p
--
-
-
1
—
-
—
1
7
-
65
-
-
0 27 0 3
02
0
0
0
0
.
-
c0
-
7 a
—
-
-
45
50
D
.
.
^
0
0
1
—
1
1 0 00
-
41-50
•
_
.
*
-
_
—
—
04
_
_.
50
46
5 67
N T R 0 D U ./
—
-
2 3 C 5 6 7 8 9 lo
5 5 1 . 5 7 07 9 6
50
-
D 1 70 4
1
8 |9 |0
Fecha; _
i/ 0 M 0
5 5 55
D
5 5 7
31-40
¿
1 • 00
0
1
0
——
—
-
L0
9 0 1 2¡3
J EM
21-30
112 3 ¿15 6
A S 1.
- --
TR 1
- --
5 6 7|B 9 0
11-20
„_
0 . 04 03 9
0
4
T0
- -
1
--
! 2 3
0 R T 0 Y*s 1 R c U
- --
V
37 5 .999
C
-
2 3 i 5
1-10
b
Programad or _ _
0
2
-
-
R
2 ¡
NOMRRRDET.PRonRAMA SIMULACIÓN DE MÉTODOS DE SATURACIÓN PARA EL ANÁLISI
INSTITUTO DE INFORMÁTICA Y COMP
z
o
UJIU
tna
z <
zctvi
££<(-
ItCL
ÜJ
Z
0- 1
K-UJ
(
UID:<
tu
D
IUNÍ-
u
UJZUJ
IU-O
Q JCC
•*(
*
otnco
<U
*
*
*
ít
*
•W
*
**•
UJS'
***** *
* tt
inzz
O <r >—
Q
<n
ÜJ
Z
aJ
<
D:
<u
•-1 —• .J
~»
<. •< U
z —• z
C¿ ÜJ
< IÜ (•-
u «o
^za
ZltJ
UOiÜ • •
UJZOO
(•-'-<
O
-4
a
<;
• a
a H
oo<
uu
«ÜJ
i
<
SHWu
JCCD
o z *
—• <í *-• \j) i/l ui "£
•
z
a
«
O'
t- C»
J
-^
<
3J
*
<
»
O
Z
—í
O<
.jiiii- o:
o Gz o
CL UJ
O
-j
<! • *
15 CX
Q X JJ
Q
«<Q
ÍÜ JK '/)
i t3 *C —«
u ua 10
VKUJUJ
IUU.QH
«•*«-«-«
a u <
o uj z:
j- a u
Z)
<
- UJ
Q IL
m
i
o:
[D
<
t- D: o: ex ce tu íu
u
1ÜVJU
a a o z u o z r z aiUDr 1 ajv-<üJUJo<-JOQ:
<a oc o« o oo ujcc H-zau.
>
o:uu
ÜJ3
«oz
I-UJUIUJ
t/) Z
Q
<aooooo
.
uJUJUJO.zzo.aau u u.
uu aoius-aonQ
*-• -3 'o rs - Jj_jjJ4
«'- — üi<uj<joí~ujujujujuuaa.uuaaaa.aaaa
4 j j o s ^ a o o z™ J<:KZ
o<üJ
zz^ u - - " « - 1UUJÜJUJ
QÍJJJJJJ
JOO
s
•
C£<C'> O
luí—( U
i* Q£ Ül r*
J O "~* X
-
o a _J <
i/i:£< Z
ujaz -•
a:u< a
*<•
*
•X
_JDUJ<aaa:Q;a<
zz
aÜJUOD
<ÜJ<<CQ««<tOO
< aaj uvjt-aaaaJ-JJJ-juu
o
o--'<UJO<ZL'JOJ
D
EC Z < DI U Ul- S U O
J^íOZZl-LUUJUJÜJÜJlUUJ
<UJZ
f-
<C !/l
zz
-x-
*
*
t
*
*
*
M-
jw
aa
U3<f
ÜJ-^
tr
X-X-
Z
aQ
u
<
tflí-K
íf
-I
—i
czzzzuu
Oí •"*
J ÜJ *S
*
#
*
UWIUUJÜJOO
LOÜJS
to
*-« ao
«•
O O ÜJ UJ C
"
ZZ
UJSO
UJÍÜZ
KDUJ
*
-tf
*
u_J J
<-JJXU.il.
Ü.ÜJÜJUJ
ÜJUJ
ZUJZZÜJCQ
3«UJ
U ^>
UJOO
10
< JIU
y
*
K-
UJZZ
ZÜJIIJ
Tí 1-T-)
tn
< Z V)
0
*.
Jj
UJUÍ
oa
UJ UJ < O D
UJOIÜJ-DD
U *I '-
<
<o
*
aa
ao
K ü.1 lü UJ ü.1 <: <
-w
fl*
tt
*
Z
<
ÜJUJ
z
ozz
OO-UJUJ
u
UJ_J
DO
0>
za: o
oo<
Z1-" -J
*
V-
UJZOUJ
00
t/ÍU
*
<r
ZZ
ZUJ
O-J
u
•
3." < —
K 13
lil < O
Od<
u
cao
au
-!f
Ü-
U)
UJZ
a tu •
i- a: -u
z a u<
za
UJ
^
< u. UJ.1z
OlLZ
a
DZX
- t í - * * * * * * * ií-
-J J
h-
J
UJD O
auuja
•• u
011
>
i_i u|¡
Hn
•U II
-> 11
ta u
olí
~
Q: i
"ü
o ]|
'Olí
•Jí I
au
al 1
_J I
H l!
ÜJI1
a: ll
A A A A
1 1 I I t 1 I 1
I I 1
I OQGtnOC'-¿YU.<LU<UJ 1
• I OQ<
ni!!1
i i i i i i loooacrHcoi
*
*
# * * # • - « - * (f * íí *
I II
- . 1 1
i1 1I ÜJ
J 1t 1'
1 1 I t
LU-JinUZK 1 I
I 1 QO I
I
* **
uuuuuuuuuuuuuuuuuuuuuuuuuuuuuuuuuuuuuuuuuuu
JUUUUUUUUUUUUUUUUUUUUUUUULJUUUUUUUUU
I
o
n
o
o
o
o
u
;/
o
o
ooo
o oo
ooo
OOO
n n ci
1
i
1
l
oo
oo
oo
o o ooo
o o ooo
*- t-
—
OO
N »-
O -fl 03
ooo o
ooo o
o oo o
nn n
f
i
i
1
fO
|
1
a>
1
>
*
. .
. *
V
V
V
r y. sen r
r nnxxn>ao«33n
7J Tl>
3J X >
73 >mm <mx)s i m o o x > c ~ro-• z m a
t— — ¡"~
>•
> "-o»n> ii u
3:s c o 2 i r 2 H > 5 :
_j,-,l-~
E
—t —i r~ 3: - l O O O — O — LJ n
•-!
5:2- - z> ~im rrr "o
fr. c
>
n ni
C
> [l¡ , » * « Z "
co—xCir-Tici r
"j^n O y. ^» <^ o '- Z U L- O <X
z z - r z '-> 3: v. rr 7; m
t_
^>
>
> t^«.73X- XI
>
t_ VT- C
5f 3^ *<
& ~i Z
r.a* - H«
l/iOlOO»--' i-O
>
* » •—
J> " - - n >• •. . >— t— "Q ^
-<
»™. > C x " Z X- ''-n.z
o. z u o nr, N
--CH-IÜ, x - u a c«- >
0" O —
Cl
tn ro—-ir<cuiiiz>cr^-o O «_ *0 H- •- 70 & í
c ^ —,.« c
• 7 xi -nm
0) X X - ? Í > - 0 " O X <
*-• (Ji
03
*-> 3 1_
03
Z WO1- Z
n
T3O--^Jfn- >
T
T3> - •- O
- i/i s X
33
7:
»
i—
C
c
W - 73 Oí 11
201
—
x
>
o>m
>—• C"l
—í
-i •< TJ ~~i
02 A » O
H a>ar« -<>
oc,
£• > ?« 21 f.
- « C/-Í 0
C O-1 — Ti'A
X"
- •
£"*
z
• ÍJ>
3J m ^ - ' O < yj -N
21 c. ~ " *—
<— N
nn n
1
i
V- «-.f"
-
1
>
«u.
f-1 —1
00
••
«— ¡\
TÍO
O
•
"D
t/1
*—
O
u
"0
OJ
h-
o
'•*
•a
t/i
1-1
71
O
*
T3
0)
r-
7Z
O •
-T3
U)
>-•
•n
o
•>
-i .
"Z
-
o
m
r
H
>
*
1
j>
<-
X
|
H
3>
TJ '
3C t-^ <t
j,
01 Z 7» 2 >
O
-
?. T
o - o o ni
O03
>- 73 rnn. z n r <:
O
C T30m
m 2. - »•- 73 11 o
n - 1173 o
> <orn 2T
r > - 0 Tí
n mxX
c Cí r *i O
r - oin m
>
J»
X-
r
>
O)
n
a
z
o
>-«
n
p-i
o
z
m
01
t~i
z
rn
T3
- xr
">0
oí OH
> .. •H X H
• > •—
•"•* O "3L.
:•:- n
Ox-
or<
m A-n
ro-
- - z
" xn
—
zo
í/¡ ox
•• >>
>
>-•
*
ZO
<-
H
2
Z Tí
-*
oo
z4
..
2X
"
. -ir 11
zo m
>- o
OX
* r
-
-*
zn TI
OO
Tí
o- r
20
>-
o
?;
<
,
X XI
O [?•
O
-*
- r x
r* ~\f
- '£.
"S. i>
Vi
DX
* >
- rn
Oí
^
01 *
>-" O T3
>
z w-^
M •!
-. (— o X
o ?: H
i
rn
O X 2T3
T! -
n
i-.
o
z
o
m
a
j>
-i
a
w
O
T3
>
73
j>
-" O» >
zr-
r-i
r
rn
- O-
- X
Z3:
O>
O
-l
••
OO
—
•- - o
z< •~n> vi
orn -i
m
H
33
a
M
o
m
r
3¿
>
o
c
z
>
-<
o
>
f7)
t f c ,
"ni'-ujM
zo:>->
O- O O X
2*-
> TI T3 ->
rnoioio
33 ^, (-, u
>-" > O f-i
0-0
- T3 •
i-n - - o
COÍ-
O CJl
*-.{flr-
"2
Tí
7; U
O-
•< r—
03-
«
•—
•* <
"Q "U
0) *- X
9 4
aico
OCJ1
—O
" *TD-
O-
01 >
" X
r-n «-*
13 A
OO
i-, ,
». "
-f) ;Q
r-* )-•
O A
" O
~\-
* *
03O3
UlC/l
273
•t 11
TJO
X-
OO
•—•«
- 13>
-
H
X
Z
O
Q
01
*n
~- o
-H >
2^
SO
z
rn
n
rn
*
-
^
Tí
O
-
-< f"
OO)
Z--
O
1
1
1
f- TI
OO
mrx
22
««
>o
- -
X
2
o
-
CD03
U1U1
OO
—
TI
— (/> oí je < m *— r* «-*
o
>
73
>
n
o
z
o
ni
,*
T»
;£
M
j,
U)
r
rn
.~
3 C - ~ 2 X r T100
V
o
m
< n
« -
>^T3^00»»
1
Ul
01
01
^ _ -
1
r~<T3->
H
O
3>
33
'S 4
TÍO)
*
*
»>,
o
"° 1
0 1
Cl 1
X 1
>1
3: 1
> 1
1
T3 1
73 1
»- 1
Z 1
"n
u 1i
> 1
r i
>
— •—
>ac i t/i-i 03: 2
2 .c 2 l 2 > je l l
--1
I1
l l l 1 23: l l l
1 1 1 I I 1 I ! 1
l l
vvvvvvvvv
V
V
< - < ' C 1 C - < < < C < i < "oc<rr;<
»>>>»»orr.mrrti
r r r r r r r r r - i o m r.
o c c o o o o c o mr HOH
3 73 7J XI T: T: 73 Tí Tí
z c c -i c
O (/i 7v X; 33
3 T J C X J C 2 T J C 3 : ¿C *«
OOCCGOOOO
O
>o o x o
n-oc
-Ti-n-n-mi-n-nT-n • > z
z > n>í>
nnnnnnnnn >r -ir
>>>3>>I>>3>>
O 2 '-'2
o o o o o o o o o o n> .
o o o c c o o o o oin on
rn rn
c o o o o o c o o o z ~<z
m m m rr. m rr, rn rn m > > >
r r
-£. r
r n n r r r r ur>r
>QOH»>»
zzo z
z oí ni/)
orjí~i73oonoo Cl 0
o> >om cooo -i n 73D
7) -i H C 01 r 73 73 33
O73C
73 rn m m < o 73 73 73 rz~7>
M Z Z " t-t 1-1 í— > n m -D
rn > > rn > o m m ni > z —
znnrontzzz <H-trn
—j •->•-• |T1 i—
H H —1 rnmmz .
rn o o n o TI m m ni rz H
Z.Z -~i Z C3
o>om
o
53 H o m f n nnrnoj
r n o o o o m m z z >— )-•
oomo
mm^mz
n
> nmmm >zxrn
omnr
> *fl "n Cl P « X P i~
i/) p PZ » n
Üí mccm
'-rnm 73 nrn
t_C.M<"DHL-C_
OO>LT3oo—> rn » rn mHrnnrn
Q
^~
>
n r 73O
XfTimQQÍ"— OQ
73HOO
>zz n o
«rz-.
T3 " O Z "013
nc
ci ni rn s> o x > j> > t_ o
33 e t-Xl » TDX73
o m
>mm> 011 >» -<
r
TI
>-• X
o
r-ooozíni^cic^ mrn m
n
7) O >
7373 rr
u
J> 'Q T3 i» —i X Cl > >
m
33 3> > H O
7JH11
>m
73 73 M 73 > ™ i-i Z U
0
»o- nnn om -<
j> n r-• j* j> c
o en 53 > n 73 33 ro m
7373
>
o-, r
> J*
XI
OO
H
un
rnm o
nrí
r
TÍ
3> >
o
m c
73 73
cooocoooo
>
!—>
1
1
í<
i >
| 73
| —,
í >CE
ir
i Fl
iw
i
ic
im
i
ZZZZZ22ZZ
t/iw—íi'íí'nooí
-QT3ÓO T O O O O
OO
1 0 1 1 1 1
1 1 1 1 1 1 ] 1 1
1 1 1 1 1 1 1 i
1 1 1 1 t ! 1 1
vwvvwvv
•c<;-<*c<-;- > £'C-c
3>3>3>3>3>3>3*3>3
rrrrrrrrr
ooccocooo
/UT^X)«'J^J7073737
10)
1 >
ir
iw
i>
OUÜOOOOOO
mmrr t rnrnmrnmm
>»»»»
mrrimmmmmmm
0. t/"' V. 1/5 (j i U- 01 (/] (
nnnnnnnnn
J>3>3>3>J>J>3>J'Í
rrrrrrrrr
>J>>>Jv>J>>>
tn o: w tn tr. u"- woio
ccccccccc
T 3 X T 3 T3 "0 13 *D T3 T
mrnmrnmrrimrJirn
3J73Xí73737373TjX
^MP_Hnl^»_,nP-
coacoooco
73X7373X7333737
oocnoocitnoc^
X 33 73 73 73 73 X X
}>3>3>}>,í*J > ->J*3 >
n
-nnn n
„,_n—-mni
,-.,--,_-,,--,,—.•nnnnnnnnn
aaaooaooo
nnooooooo
Gomrnmnimmm
zzrrtn
nn
<r rr r
j > 3 > —j > — >>i>>
—i -1 O Ü >
fnmxoononn
2ZQC"OOOO
> J > C T O73 73 73
nnrnoz73737i7)
í— i— r- —
aarno<mmmrn
z z r m m z. z z
ni r~ H -i H H
oon"uomrnrnm
rnm-iOn
XH-arnmo
-nnomomzzm
r~ r 2 z >
conommmn
t_ t_ ci *M xi r">
oo z> 53 n
o
m a «nimm
m r n H -i -i c_ t.
zzp-i o>mrn
n 33 n
mm o .-^o o
t-c
no
mni
>z
^- —
o
o
o
o
o
3
o
0080
0065
0066
0067
0068
0069
0070
0071
0072
0073
0074
0075
0076
0077
0078
0079
0054
0055
0056
0057
0058
0059
0060
0061
0062
0063
0064
0053
0034
0035
0036
0037
003S
0039
0040
0041
0042
0043
0044
0045
0046
0047
0048
0049
0050
0051
0052
0020
0021
0022
0023
0024
0025
0026
0027
•0023
0029
0030
0031
0032
0033
c
C
C
C
c
C
C
C
C
C
C
DO l ü Q 1=1,7
V ( i ) =0.0
>ARRANÜUE
Vf 51 =
'VAEÜI
íDELTA
CIAt 1
CIAC2
CI A C 3 > = I A X
C ¡Aí 4 ) = T M
> = 1FD
ICOM= O
GO TJ 30
300
60
50
40
.
30
VALORES
A MATRICES
40
DE
'
.
GRAFICACION
.
•
,
.
•MÉTODO RUNGE KUTTA''
SATURA £ Pb í AD . PS 1 AO , K D « K O )
>LLAMAÜA A S U B K U T Í M A OUE CALCULA
CALL
LOS COEFICIENTES DE LAS
EC. D I F E R E
ÍF-: INDI -¿o . o í GO ro 300
> L L A M A O A ' A SUBRUTINA oue CALCULA LOS FACTORES DE S A T U R A C I Ó N
F(5)=VA£:d<--VP+Pt I I ) * V í 2 ) +P ( 1 2. ) *V ( 4 ) +P ( 1 3 ) *V( 5 )
PA = V Í 2) V;PÍ M ) *UÍ 1 ¿ + P Í 1 5 Í + V Í 3 »
FI=Vll)*(Pllb>*V(2J4-P(17í.*V{4)*P(18)*V(5))
Fl U = V A t a * V Q + P { 1 J * V Í 1 Í - V A E 8 * V ( 2 í - f V £ 6 1 4-P ( 2 í * V ( 3 )
F{2) = V A E r f ¥ V D +V A £ t 3 . í V ( l ) * V < 6 ) * - P ( 3 ) * V ( a ) * - P { 4 - ) * V ( A ) + P ( S ) * V ( S )
F;3)-P¡ü)*V(l)+PÍ7)*V(3)
V( 7 ) J
VAM=CA8StVA)
V(7 ) )
IF;K. NE . i t GO TQ 70
LAS DERIVADAS
K=RUNGEÍ7 , V ,F, T ,H)
>EVALUAR
VÍRETE í J W . 9 9 J T . V í 1 ) , V £ 2 í . V í 3 ) » V Í 4 ) i V { 5 ) » V C f i ) , V Í 7 ) , C I A Í 1 ) , C I A t 2 >
, C I A ( 3 ) > C Í A ( 4) ,CI A( 5)
A I Q M Í 1 , KO'C ) = C 1 A I 1 i *N 10
A I D M C 1 ( K D C ) = C I A ( 2) *N ID
A I M A i M ! í .KDC ) = C I A l 3 )*NSA
AIFDMÍI,KOCÍ=CIAÍ5)«NtFD
PSIUH í I , i ^ D C } = V t 1 ) * N S O
P S I D M í 1 .KDC ) = V Í 2 ) * N S D
DELTAMC 1 >K.DC) = V
TMMÍ 1 ,KDC) =C I A Í
DVRS=V( 6Í-VAEM
DVKÍ.M £ 1 ,KÜL ) = D V R S * N V R
KDC=KDC + 1
>ASIGNAR
W R I T E í J W , 17 ) I D 1 S T
T=0.ü
ICQUNT=0
TEC=Ü ,0
KDC=1
.IFÍ IÜ I S T . E Q .3)
GO Tu
GO Tu 50
WRIl'tií J K , 18 >
GO Tu 60
* R l T E ( J \ v , 1 9Í
rcow=i
K0=1.0
KQ=l.0
TM=0.01
VF=Q.0
DO 200
1 = 1 ,5
200 C I A Í 1 J = 0 . 0
.100
20
Vt O = PSIO
V ( 2 > = PS ID
V ( 3 ) = P5.1KQ
V ( 4 ] = PSl^D
i
0127
O 128
0129
O 130
0131
0132
0123
0124
0121
0122
Olí 9
0120
0117
01 18
0115
01 16
c
C
c
c
c
c
c
C
C
C
BRUSCO DEt_
TÜP.OUS
27
00
—>FOHMATOS Oh LfcCTURA
GO TJ
ICOUNT=0
Y ESCRITURA
V f R I T £ ( J W . 3 S ) H1Q
LLAMADA A SU8RUTÍNA DE GRAFICA'CION
CAL^ P u O T i J W , A I Q M » I , K D C , N Ü O )
W R I T E í J W . 3 6 í NIO
L L A M A D A A S U B R U T I N A DE G R A F I C A C Í G N
CALL P L O T t J W , A I O M , i , K O C , N O O )
W R I T E ÍJ'w. J 7 Í N S A
LLAMADA A S U B K U T I N A DE G R A F L C A C E Q M
CALL P L O T Í J W , A 1 M A M . 1 , K O C , N A O )
W R I T E t J W . J8)
NIFD
LLAGADA A SUÜñUriNA DE G R A F t C A C I O N
CALL PLOT C J W , A I F O M , 1 , K D C , N F O )
H ' R I T c í J k f 39 ) ÑSQ
L L A M A D A A S U Ü K U T Í N A DE G R A F E C A C I O N
CALL PLOTÍ J W . P S I Ü M , 1 , K D C , N F S Q )
V í R l T £ í Jte. 4 1 í NSD
LLAMADA A S U U R U T I N A DE Ü R A F I C A C I O N
CALL P L O T Í J W . P S I D M , 1 , K O C , N P 5 D í
W R I T E Í J h . 4 - 2 ) ND
LLAMADA A SUBnUT
DE G R A F I C 4 C I O N
CAL.L Pt_or ( J W . L E ^
, 1 .KDC.NADO)
W R J T E Í J W . 4 3 í NVR
LLAMADA A S U B R U T Í N A DE G R A F I C A C I O N
CALL P L O T Í J W . D V R 5 M , 1 , K D C , N W )
W R I T E v JV,-. 4 4 ) NT
LLAMADA A S U B R U T I N A DE G R A F I C A C I O N
CALL P L O T I J W , T M M i 1 , K D C » N T O í
GQ TU ¿ti
ICÜUNT= tCüUNT+1
IFl íCOUNT.Nb..íF.ÍEO ) GO TO 300
IF; I F P U O T . N E . i j GÜ TO 2a
> G R A F I C A R LAS VA^ÍABLES DE SALIDA
WRITt {-*tof 323VF ,VFINC,TPERT, [OÍST,AEI
25 CFír.Lc.TMAX) GO TQ 27
KDC=KDC/NP
> INCREMENTO BRUSCO DEU VDLTAJE DE EXCITACIÓN
0103
Q1C4
O IOS
0106
0107
0108
0113
0 I 14
TRIFÁSICO
TM=TM-*TINC
ICOM-1
TEC^AEI
-HRITE E J W . 3 1 Í T M » TÍNC.TPERT. I D I S T , AEI
GO 10 ¿5
.
'
> INCUcMENTO
63 VF^VF+VFINC
01 1 1
O 112
DISTURBIOS
V A = C M P L X C O - .0. )
ICOM=1
TEC=AEI
WRÍTEÍJW,29ÍTPERT.ID1ST,AEI
GQ TO 25
>CORTOCIRCU1TO
62
0109
01 10
DE LOS
GO T Ü Í 6 J . . Ó 2 . 2 5 . 6 3 ) , L D I S T
>SíMUi_ACIÜN
25
0090
0099
0100
0101
O 102
61
0093
0094
0095
0096
0097
C
C
C
26
0092
GO TU
C I A Í J ) = C I A Í 1 ) * C O S Í TETAí+CIAt2)*SIN(TETA¡
C l A Í * ) = V ( 2 ) v C l A Í 1 Í-VÍ 1 )*CIAIS )
TETA=: vi 7t +-VAEB* rs-Tec
009 i
C L A { 1 ) = P( I
C l A ( 5 } = ( V ( 5 Í - C I A Í 2 J V X A D J / ( XLFD t-XAD )
IFUCÜM.GT.O) Gü TO 25
I F t T . G c . T P E R T J GG TO 26
70
0083
0084
0085
0036
0087
0088
0089
0090
o
o
o
O
43
90
0156
O 157
42
0153
44
41
0152
0154
39
O 155
33
0150
99
29
• MULTIPLICACIÓN N I F D = ' , Í 6 / / J
F O R M A T Í 1 H C . 3 5 X . ' C O N C A T E N A C I O N E S DE FLUJO DEL EJE EN C U A D R A T U R A :
. P S I Q ' / / 3 ¿ X , ' F A C TJR D E - M U L T I P L I C A C I Ó N N S Q = ' , 1 6 / / >
F O R M A T C IriC , 3 S X , ' C O N C A T E N A C I O N E S DE FLUJO DEL EJE D I R E C T O : P S I D * / / ,
, 3 3 X , ' F A C T O R Dt M U L T I P L I C A C I Ó N N S O = ' , I 6 / / Í
F O R M A T Í 1 H C , 5 0 X , ' Á N G U L O DE P O T E N C I A : D E L T A ' / / 5 O X , ' F A C T O R DE
. - M U L T I P L I C A C I Ó N ND= * , í ó / / í
FOHMATC.lriC , 42X , ' O E S V I A C I O M DE L A V E L O C I D A D R O T Ó R I C A : D V R S ' / / 4 2 X .
. ' F A C T O R DE M U L T I P L I C A C I Ó N N V R = « , l 6 / / >
F O R M A T Í 1 H C , 4 9 X . ' TOROUE E L E C T R O M A G N É T I C O : TE * / / 4 9 X » ' F A C T O R D E
. M U L T I P L I C A C I Ó N NT= ' , 16/V )
STOP
GND
FORMATÍ IHC,4yx,'CJRRIENTE DE EXCITACIÓN: IFD'//49x,-FACTOR DE
5X , ' rfH' , 6 X . ' D E L T A * , 5 X , ' IQ ' , 7 X » ' I D ' ,7X', ' I A X * , 6 X . ' TE ' » 7 X , ' IFD ' , // )
FORMATC 5X, F5.J, 1 2 F 9 . 4 )
F O k M A T Í 4 ( / ) , 5 0 X , ' C O R T O C I R C U I T O T R I F A S ICO ' / / 4 4 X , * A N A L [ S I S D E L A S
. V A R I A B L t S DE S A L I D A ' / / 5 X . ' T P £ R T = ' , F 1 Q . 5 , S X , ' I D I S T = ' , I 2 ,5X ,
, ' A E I = ' . F1 O . 5 J
31 F Q R M A T Í 4 Í / ) . 47 X ,' INCREMENTO BRUSCO DEL T O R Q U E ' / / 4 4 X , » A N A L I S I S DE
. L A S V A r í I A r i L E S DE S AL I DA ' / / S X , ' TM= " , F 10 . 5 - S X * * Ti NC= ' , F 1 O . 5 , 5 X »
. 'TPE.KT- 1 .Fl Q . 5 , 5 X . ' Í D I S T = ' , I 2 , SX . u AE 1=' « F I O .5 )
F O R M A T Í 4 Í / ) , 4 0 X ,' INCREMENTO BRUSCO D E L V O L T A J E D E E X C I T A C I Ó N ' / /
• 4 4 X , ' A N Á L I S I S DE LAS V A R I A B L E S DE SAL I D A ' A / 5 X , ' VF= • ,F 1 O . 5 * 5 X ,
. ' V F l N C = ' . F 1 0 . b , S X f -TPERT-' t F l O . S . S X » ' I D I S T = ' . I 2 » 5 X , ' A E I = ' , F 1 0 . S )
35 FORMATt 1HC,45X , 'CÜRRÍENTE DEL EJE EN C U A D R A T U R A : I Q ' / / 4 5 X t 'FACTOR
. DE M U L T I P L I C A C I Ó N N l Q = ' , I 6 / / >
36 F O R M A T Í 1HC , ífíiX, ' C O R R Í E N T E DEL EJE D I R E C T O : , t D ' / / 4 8 X . ' FAC TOR DE
.KULTIPLÍCAC[UN N I D - ' , l ó / / >
37 F Ü R W A T I 1HC, 4 4 X , 'COMPONENTE E F E C T I V A DE IA: I A X ' / / 4 4 X , ' F A C T O R DE
.MULTIPLICACIÓN N I A = ' , I ó / / >
2bX . ' ! = ' , I 2/2bX , » < V A = ' , F I O ,5 ,6X . ' VA= ' » í F 1 O . 5 , í-6 . 3 ) ,5X , '
5X . ' VAt£B=* , F1G -o/¿5X. ' H= ' .FIO .5 . 7X. ' ISAT=' , IZ,7X, ' IKODEL=' ,
• I NO I = ' .12)
16 FORMATÍ 4Í /J .51 X , 'CONO ICÍON ES I M [ C I ALES • / , 5 1 X , 2 1 ( • = ' > , /// I 5X
(FlO.S.Flü.S) ,18X. 'Í0=' .F10-5.3X, 'ID=* ,FIO-5.7X, ' IFD=' ,F1 O.S/ »
13,\ ' PS 1Ü=' ,F1 O .5, 5X. 'PS ID=' , F 1 O . 5 t 5X , ' PS I KQ= ' ,F1 0.5» 5X, ' PS I K
FIO. ó .5.X . 'PS1FD=' .F10.5./15X, 'TM =: ,F10.5,4X, 'DELTA=l ,F10.5,5Xi 'VA
R[ = » .FlO.t5.8X» É V F = ' , FIO. 5, //////)
17 FQRMATÍ4Í/) ,5oX, s ARRANOUE'//56X,'lO t ST= ' . 12)
13 FORMATt 1HC? 4SX , 'OPERACIÓN E^J ESTADO ESTABLE '/. 49X . 27 ' = •), 6 í /),
« P S Í O .bX, 'PSID' ,SX,'PSEKC)' ,4X, 'PSIKD',4X, 'PSIFD 1 ,5X, • WR
. ' , o X , ' D c L T A 1 » b X , ' 1 0 » ,7X, ' ID' ,7X, 'ÍAX' ,ÓX, 'TE' »7X, • £FD • .//>
19 F O R M A T Í IriC . 4 6 X .' OPERACIÓN EN ESTADO TRANS I TOR t O • / . 4 7 X , 3 1 [ ' = • > »
6 ( / J , y x , ' T ' , 4 X , ' P S I Q 1 ,5X, 'PStD' .5X, 'PSIKO 1 .4X,'PS¡KD' .4X. 'PSIFD'
39x,«+bt • = • > , / / / 3 s ? x . • 1 = 1: A C C I Ó N M O T O R A ; 1=2: A C C I O M G E N E R A D O R A - / / /
i s FORMATÍ 4 ;/) ,jt/x , - D A T O S P A R A CALCULAR LAS CONDICIONES I N I C I A L E S ' / ,
/ / / / 7 X , ' t í d = ' ,F 10 .6 . b X . ' R K Q = ' . F l O . o , 5 X , ' R K D = ' . F I O .5 , SX , » R F D = ' ,
FIO .5 , o X , ' XLS=' . F 1 0 . 5 . S X / 6 X . • X A Q = ' . F 1 0 . S . 5 X , ' X A D = ' ,F1 O .5 .4X .
' X L K Q = * ,Flb . 5 . 4 X , ' XLKD=' ,F 10 . 5 . 4 X . ' X L F D ^ 1 . F 1 0 - S . 4 X , ' H M A O = ' ,F1 0 . 5 >
11 F O R M A T Í 1HC, 4 9 X , ' P A R Á M E T R O S DE LA MAOU INA ' / . 5 0 X , 24Í '•= ' 1 t
FORMAT(13íü/616.í=l0.5í
10 FORMATÍ SFIO , & / 4 F i o . s )
12
0151
0149
01A8
0147
0146
0145
0143
O
0142
01*0
0141
0139
0138
O 135
0136
0137
l C A a / / - 2 b X ,'
A d R I L - 1904
' , 10 ( / ) , 25X , ' O B J E T I V O : RESUL_V
R EL S I S T E M A D& ECUACIONES DE U N A M A Q U I N A ' • / , 2 5 X , 1 7Í ' = ' ) , / , 4 3 X , ' S [
CRJMICA M O D I F I C Á N D O L A S POR M E D I O D E F A C T O R E S ' / / . 4 - 3 X . ' D E S A T U R A C I Ó N
P A R A INJ'HUDUCIR EL EFECTO DE LA N O ' / / . 4 3 X , ' L I N E A L I D A D DEL HIERRO'
////i
F Q Í Í M A T 1 F 1 Q . 5 , ( F I O . 5, FIO. 5 ) . 2 F A 0 . 5 , 1 2 , 2 F 1 0 . 5 , 3 I 2 / 3 F 1 0 . 5 . 3 1 2 )
A N E X O
COMPARACIÓN CON RESULTADOS EXPERIMENTALES
Con la finalidad de cumplir con el objetivo de tener una comparación
de los resultados que proporcionan los modelos implementados en éste
trabajo, con los resultados experimentales; se han grafizado en forma
conjunta los resultados obtenidos en el Laboratorio y los que propqr_
clona el programa digital para varios de los modelos; además, se han
elaborado varias tablas'con los valores que toman las corrientes
en
sus "picos" luego de producirse la perturbación; estos resultados
se
presentan en las Figuras 1, 2, 3 y 4 y en las Tablas 1, 2, 3 y 4.
Comparando estos resultados se tiene que:
En la Figura 1 y en la Tabla 1 se presenta la forma de onda y los va_
lores de los dos primeros picos de la corriente de fase para un valor
de voltaje terminal (Va) de 1.0 p.u. para varios de los modelos impl_e_
mentados en el presente trabajo (no saturado y modelos números 3, 4 y
7) y para el modelo experimental; pudiéndose notar que: los picos se
producen prácticamente a un mismo tiempo; el modelo 4 presenta
una
oscilación producto del proceso mismo de cálculo, presentando además
valores en los picos un poco menores a los valores de los modelos 3 y
7; el resultado de la prueba de Laboratorio presenta la misma forma de onda pero proporciona valores menores a los demás modelos en los
dos primeros picos; el modelo no saturado presenta un valor un
poco
más alto que el resultado experimental en los dos primeros picos.
En la Figura 2 y en la Tabla 2 se tiene la corriente de excitación pa_
ra un valor de voltaje terminal de 1.0 p.u. para el modelo no saturado y para los modelos números 3, 4 y 7, anotándose que no se pudo o^_
tener el resultado experimental; se puede ver que el modelo no satura_
do presenta una corriente antes de la perturbación menor que la de los
modelos 3, 4 y 7; pero, al producirse el cortocircuito trifásico
se
tiene en el primer pico una corriente menor que 1a.de los modelos 3 y
7 pero un poco mayor que la del modelo 4; amortiguándose luego la c£
rriente de forma similar para todos los modelos.
También se ha corrido el programa digital para un valor un poco más a_l_
to de voltaje terminal (1.2 p.u.) para la corriente de fase y la co_
rriente de excitación, resultados estos que se presentan en las Figuras 3 y 4 respectivamente. Se puede ver en cuanto a la corriente
de
fase,-que se presenta la oscilación para el modelo 4 al igual que
se
tuvo en el caso del voltaje terminal de 1.0 p.u. además se puede ver que el modelo no saturado presenta valores menores en los picos
que
los modelos 3 y 7 no asT con respecto al modelo 4 que presenta un va_
lor un poco menor (ver Figura 3 y Tabla 3).
En cuanto a la corriente de excitación se puede ver que la corriente antes de producirse la perturbación tiene un valor como era de espera_r
se menor en el modelo no saturado que en los modelos 3, 4 y 7; el pj_
co se produce a un mismo tiempo, los modelos 3 y 7 presentan un mayor
valor que el modelo no saturado, el modelo 4 da un menor valor de la
corriente de pico que él modelo no saturado (ver Figura 4 Tabla 4).
De estas comparaciones se puede concluir que los resultados del progra_
ma digital en forma especial los que proporcionare los modelos que utj_
lizan el método de cálculo "una vez" .son aceptables, presentándose ob
vías diferencias como producto de las asunciones que se hacen y además
debido a la no total exactitud en los valores de los parámetros de la
máquina sincrónica.
Como consecuencia de lo anterior se recomienda utilizar los modelos que
usan el método de cálculo "una vez" ya que además producen ahorro
cuanto al tiempo de computación.
en
TABLA No. 1
CORRIENTE DE FASE
PICO POSITIVO
(A)
MODELOS
PICO NEGATIVO
(A)
EXPERIMENTAL
38
- 35
NO SATURADO
41 .
- 37.5
MODELO No. 3
44
- 40
MODELO No. 4
40
- 38.5
MODELO No. 7
44
- 40
TABLA No. 2
CORRIENTE DE EXCITACIÓN
CORRIENTE INICIAL
(A)
PICO POSITIVO
(A)
1.8
12.6
MODELO' No, 3
2.14
13.0
MODELO No. 4
2.14
11.85
MODELO No. 7
2.14
13.0
MODELOS
NO SATURADO
-
TABLA No. 3
CORRIENTE DE FASE
MODELOS
PICO POSITIVO
(A)
PICO NEGATIVO
(A)
NO SATURADO
47.5
- 51.8
MODELO No. 3
51.25
- 56.25
MODELO No. 4
46.25
- 50.6
MODELO No. 7
51.25
- 56.25
•TABLA No. 4
MnnPi ÍK
' MUUtLUb
CORRIENTE INICIAL
(A)
PICO
POSITIVO
(A) '
NO SATURADO
2.16
15.0
MODELO No. 3
2.8
15.5
MODELO No.' 4
2.8
13.6
MODELO No. 7
2.8
15.5
Crt
n
H
o
.O
c
H
O
titlrT^tp^^titur- ,*^—
¿¿¿ni—Til*-K*-+. / -T-+T-
^'-•^i
-^M-*^r^.. U...-I ..^-rfj^J [V. «-rr*r^ -i-"•lr ^ — t?f*-;-*t*»* :í*-; ^"^M-J-T'-
riH tH tíK Htnr